Run-time Configuration¶
OpenDDS configuration is concerned with three main areas:
Common Configuration Properties – configure the behavior of DCPS entities at a global level. This allows separately deployed processes in a computing environment to share common settings for the specified behavior (e.g. all readers and writers should use RTPS discovery). See Common Configuration Properties for details.
Discovery Configuration Properties – configure the behavior of the discovery mechanism(s). OpenDDS supports multiple approaches for discovering and associating writers and readers as detailed in Discovery Configuration.
Transport Configuration Properties – configure the transport framework which abstracts the transport layer from the DCPS layer of OpenDDS. Each pluggable transport can be configured separately. See Transport Configuration for details.
Configuration Approach¶
Most of OpenDDS is configured through a key-value store.
Keys are strings that are converted to a canonical form before being stored by 1) converting camel case to snake case, 2) capitalizing all alphabetic characters, 3) replacing all non-alphanumeric characters with underscores, and 4) stripping leading, trailing, and duplicate underscores.
For example, the key !SectionInstance__PROPERTY is canonicalized into SECTION_INSTANCE_PROPERTY before being stored.
Values are stored as strings and converted to other types as necessary.
The documentation for each key contains its canonical name.
A key has the following parts:
section – The section describes the area of functionality that is being configured.
instance – (optional) The instance names a particular collection of configuration values. Configuration keys that do not have an instance imply a singleton or global.
property – The property names a variable relative to the section and instance.
Sections, instances, and properties can contain underscores meaning that underscores are not used as delimiters to separate the section, instance, and property. This ambiguity is resolved by the following rules:
Sections are known by OpenDDS. For example, OpenDDS will look for RTPS Discovery instances under keys prefixed by
RTPS_DISCOVERY.Instances must be introduced by a special key-value pair where the value is prefixed by
@. For example,RTPS_DISCOVERY_MY_DISCOVERY=@MY_DISCOVERYintroduces an instance namedMY_DISCOVERYunder theRTPS_DISCOVERYsection.
Suppose the configuration store contains the following key-pairs: RTPS_DISCOVERY_MY_DISCOVERY=@MY_DISCOVERY and RTPS_DISCOVERY_MY_DISCOVERY_RESEND_PERIOD=5.
In this case, the MY_DISCOVERY instance of RTPS_DISCOVERY will have a RESEND_PERIOD with a value of 5 (seconds).
This table shows a list of the available configuration section types as they relate to the area of OpenDDS that they configure.
Focus Area |
Section Title |
|---|---|
Other |
The configuration store can be populated in a number of ways:
By default and for backwards compatibility, the different configuration mechanisms are processed in the following order:
Environment variables
Command-line arguments (will overwrite configuration from environment variables)
Configuration file (will not overwrite configuration from environment variables or command-line arguments)
APIs called by the user (will overwrite existing configuration)
However, multiple configuration files can be processed by setting DCPS_SINGLE_CONFIG_FILE=0.
This can be done with an environment variable OPENDDS_DCPS_SINGLE_CONFIG_FILE=0 or a command-line argument -DCPSSingleConfigFile 0.
This causes the different configuration mechanisms to be processed in the following order:
Environment variables
Command-line arguments and configuration files are processed sequentially and overwrite existing configuration
APIs called by the user (which also overwrite existing configuration)
Users can store configuration data for their applications in the configuration store.
Users taking advantage of this capability should use the section names of APP and USER which are reserved for this purpose.
Configuration with Environment Variables¶
OpenDDS reads environment variables that begin with OPENDDS_ to populate the configuration store.
An environment variable OPENDDS_KEY=VALUE causes KEY=VALUE to be saved in the configuration store.
KEY is canonicalized before being stored.
To set the ResendPeriod on an rtps_discovery instance named MyDiscovery to 5 seconds using environment variables, one would set the following:
OPENDDS_RTPS_DISCOVERY_MY_DISCOVERY=@MY_DISCOVERYOPENDDS_RTPS_DISCOVERY_MY_DISCOVERY_RESEND_PERIOD=5
Configuration with Command-line Arguments¶
This section describes the command-line arguments that are relevant to OpenDDS and how they are processed.
Command-line arguments are passed to the service participant singleton when initializing the domain participant factory.
This is accomplished by using the TheParticipantFactoryWithArgs macro:
#include <dds/DCPS/Service_Participant.h>
int main(int argc, char* argv[])
{
DDS::DomainParticipantFactory_var dpf =
TheParticipantFactoryWithArgs(argc, argv);
// ...
}
Command-line arguments are parsed in two phases. The following arguments are parse in the first phase:
-DCPSSingleConfigFile 0|1- Enables/disables the legacy behavior of a single configuration file that is processed after environment variables and command-line arguments and does not overwrite existing configuration (default 1). When disabled, arguments processed in the second phase are processed as they are encountered and overwrite existing configuration.
The following arguments are processed in the second phase:
-DCPSConfigFile <path>- Causes configuration to be read from the file indicated by<path>. It is processed immediately if-DCPSSingleConfigFile 0and deferred to the end of argument processing, otherwise.-OpenDDSKEY VALUE- CausesKEY=VALUEto be saved in the configuration store. The keyKEYis canonicalized before being stored. To set the[rtps_discovery] ResendPeriodon an[rtps_discovery]instance namedMyDiscoveryto 5 seconds using environment variables, one could use the following arguments:-OpenDDS_rtps_discovery_MyDiscovery @MY_DISCOVERY-OpenDDS_rtps_discovery_MyDiscovery_ResendPeriod 5
-DCPSx VALUE- CausesCOMMON_DCPS_x=VALUEto be saved in the configuration store. The keyCOMMON_DCPS_xis canonicalized before being stored.-FederationX VALUE- CausesCOMMON_FEDERATION_X=VALUEto be saved in the configuration store. The keyCOMMON_FEDERATION_Xis canonicalized before being stored.
Configuration with a File¶
The -DCPSConfigFile <path> argument described above causes OpenDDS to read configuration from a human-readable ini-style text file.
For example:
./publisher -DCPSConfigFile pub.ini
publisher -DCPSConfigFile pub.ini
For each of the section types with the exception of [common] and [ice], the syntax of a section header takes the form of [<section_type>/<instance_name>].
For example, a [repository] section type would always be used in a configuration file like so: [repository/repo_1] where repository is the section type and repo_1 is an instance name of a repository configuration.
Using instances to configure discovery and transports is explained further in Discovery Configuration and Transport Configuration respectively.
To set a default configuration file to load, use TheServiceParticipant->default_configuration_file(ACE_TCHAR* path), like in the following example:
#include <dds/DCPS/Service_Participant.h>
int main(int argc, char* argv[])
{
TheServiceParticipant->default_configuration_file(ACE_TEXT("pub.ini"));
DDS::DomainParticipantFactory_var dpf =
TheParticipantFactoryWithArgs(argc, argv);
// ...
}
pub.ini would be used unless -DCPSConfigFile is passed to override the default configuration file.
If there is a directory with multiple configuration files, then OPENDDS_CONFIG_DIR can be used to make -DCPSConfigFile relative to that directory.
For example, the following commands would have the same effect:
./publisher -DCPSConfigFile /pretend/this/is/a/long/path/a.ini
./subscriber -DCPSConfigFile /pretend/this/is/a/long/path/b.ini
export OPENDDS_CONFIG_DIR=/pretend/this/is/a/long/path
./publisher -DCPSConfigFile a.ini
./subscriber -DCPSConfigFile b.ini
Configuration with API¶
ConfigStore API¶
The configuration store API allows any configuration value to be set and retrieved.
The interface for the ConfigStore is intentionally generic to facilitate multiple language bindings without specific support for every configuration property.
See dds/DdsDcpsInfrastructure.idl and dds/DCPS/ConfigStoreImpl.h for more details.
#include <dds/DCPS/Service_Participant.h>
int main(int argc, char* argv[])
{
// ...
TheServiceParticipant->config_store()->set_string(
"RTPS_DISCOVERY_MY_DISCOVERY", "@MY_DISCOVERY");
TheServiceParticipant->config_store()->set_string(
"RTPS_DISCOVERY_MY_DISCOVERY_RESEND_PERIOD", "5");
// ...
}
import OpenDDS.DCPS.TheServiceParticipant;
import OpenDDS.DCPS.ConfigStore;
// ...
ConfigStore cs = TheServiceParticipant.config_store();
cs.set_string("RTPS_DISCOVERY_MY_DISCOVERY", "@MY_DISCOVERY");
cs.set_string("RTPS_DISCOVERY_MY_DISCOVERY_RESEND_PERIOD", "5");
// ...
Specific APIs¶
Various classes provide methods that allow an application to configure OpenDDS.
See
Service_Participantindds/DCPS/Service_Participant.hSee
InfoRepoDiscoveryindds/DCPS/InfoRepoDiscovery/InfoRepoDiscovery.hSee
RtpsDiscoveryConfigindds/DCPS/RTPS/RtpsDiscoveryConfig.hSee
TransportRegistryindds/DCPS/transport/framework/TransportRegistry.hSee
RtpsUdpInstindds/DCPS/transport/rtps_udp/RtpsUdpInst.hSee
TcpInstindds/DCPS/transport/tcp/TcpInst.hSee
ShmemInstindds/DCPS/transport/shmem/ShmemInst.h
Common Configuration Properties¶
The [common] section of an OpenDDS configuration file contains options such as the debugging output level, the location of the DCPSInfoRepo process, and memory preallocation settings.
A sample [common] section follows:
[common]
DCPSDebugLevel=0
DCPSInfoRepo=localhost:12345
DCPSLivelinessFactor=80
DCPSChunks=20
DCPSChunksAssociationMultiplier=10
DCPSBitLookupDurationMsec=2000
DCPSPendingTimeout=30
It is not necessary to specify every option.
Option values in the [common] section with names that begin with DCPS or ORB [1] can be overridden by a command-line argument.
The command-line argument has the same name as the configuration option with a - prepended to it.
For example:
subscriber -DCPSInfoRepo localhost:12345
- [common]¶
- bit_autopurge_nowriter_samples_delay¶
- Config store key:
COMMON_BIT_AUTOPURGE_NOWRITER_SAMPLES_DELAYDefault:DURATION_INFINITE_SEC(disabled)Sets the
autopurge_nowriter_samples_delayvalue of the Reader Data Lifecycle QoS for built-in data readers.
- bit_autopurge_disposed_samples_delay¶
- Config store key:
COMMON_BIT_AUTOPURGE_DISPOSED_SAMPLES_DELAYDefault:DURATION_INFINITE_SEC(disabled)Sets the
autopurge_disposed_samples_delayvalue of the Reader Data Lifecycle QoS for built-in data readers.
- DCPSBidirGIOP=<boolean>¶
- Config store key:
COMMON_DCPS_BIDIR_GIOPDefault:1(enabled)Note
This property is only applicable when using InfoRepo Discovery.
Use TAO’s BiDirectional GIOP feature for interaction with the The DCPS Information Repository. With BiDir enabled, fewer sockets are needed since the same socket can be used for both client and server roles.
- DCPSBit=<boolean>¶
- Config store key:
COMMON_DCPS_BITDefault:1(enabled)Controls if Built-in Topics are enabled.
- DCPSBitLookupDurationMsec=<msec>¶
- Config store key:
COMMON_DCPS_BIT_LOOKUP_DURATION_MSECDefault:2000(2 seconds)The maximum duration in milliseconds that the framework will wait for latent Built-in Topics information when retrieving BIT data given an instance handle. The participant code may get an instance handle for a remote entity before the framework receives and processes the related BIT information. The framework waits for up to the given amount of time before it fails the operation.
- DCPSBitTransportIPAddress=<addr>¶
- Config store key:
COMMON_DCPS_BIT_TRANSPORT_IP_ADDRESSDefault:INADDR_ANYNote
This property is only applicable when using InfoRepo Discovery.
IP address identifying the local interface to be used by TCP Transport for the Built-in Topics.
- DCPSBitTransportPort=<port>¶
- Config store key:
COMMON_DCPS_BIT_TRANSPORT_PORTDefault:0Note
This property is only applicable when using InfoRepo Discovery.
Port used by the TCP Transport for Built-in Topics. If the default of
0is used, the operating system will choose a port to use.
- DCPSChunkAssociationMultiplier=<n>¶
- Config store key:
COMMON_DCPS_CHUNK_ASSOCIATION_MULTIPLIERDefault:10Multiplier for the
DCPSChunksor themax_samplesvalue in Resource Limits QoS to determine the total number of shallow copy chunks that are preallocated. Set this to a value greater than the number of connections so the preallocated chunk handles do not run out. A sample written to multiple data readers will not be copied multiple times but there is a shallow copy handle to that sample used to manage the delivery to each data reader. The size of the handle is small so there is not great need to set this value close to the number of connections.
- DCPSChunks=<n>¶
- Config store key:
COMMON_DCPS_CHUNKSDefault:20Configurable number of chunks that a data writer’s and reader’s cached allocators will preallocate when the Resource Limits QoS value is infinite. When all of the preallocated chunks are in use, OpenDDS allocates from the heap. This feature of allocating from the heap when the preallocated memory is exhausted provides flexibility but performance will decrease when the preallocated memory is exhausted.
- DCPSDebugLevel=<n>¶
- Config store key:
COMMON_DCPS_DEBUG_LEVELDefault:0(disabled)Integer value that controls the amount of debug information the DCPS layer logs. Valid values are
0through10.
- DCPSDefaultAddress=<addr>¶
- Config store key:
COMMON_DCPS_DEFAULT_ADDRESSDefault:0.0.0.0Default value for the host portion of
local_addressin transport instances and some other host address values:
- DCPSDefaultDiscovery=DEFAULT_REPO|DEFAULT_RTPS|DEFAULT_STATIC|<name>¶
- Config store key:
COMMON_DCPS_DEFAULT_DISCOVERYDefault:DEFAULT_REPOSpecifies a discovery configuration to use for any domain not explicitly configured.
- DEFAULT_REPO¶
Uses a default InfoRepo Discovery configuration.
- DEFAULT_RTPS¶
Uses a default RTPS Discovery configuration.
- DEFAULT_STATIC¶
Uses a default Static Discovery configuration.
- <name>¶
Name of a user-defined discovery configuration. This can either be a
[repository]or[rtps_discovery]section
See Discovery Configuration for details about configuring discovery.
- DCPSEventDispatcherThreads=<n>¶
- Config store key:
COMMON_DCPS_EVENT_DISPATCHER_THREADSDefault:1Number of threads used by the process-wide
EventDispatchercreated byService_Participant. This dispatcher is used by OpenDDS internal services and must always have at least one thread. Note: This value is currently only read and used at startup for EventDispatcher creation.
- DCPSGlobalTransportConfig=<name>|$file¶
- Config store key:
COMMON_DCPS_GLOBAL_TRANSPORT_CONFIGDefault: The default configuration is used as described in Overview.The transport configuration that should be used as the global default one.
- $file¶
$fileuses a transport configuration that includes all transport instances defined in the configuration file.
- DCPSInfoRepo=<objref>¶
- Config store key:
COMMON_DCPS_INFO_REPODefault:file://repo.iorObject reference for locating the The DCPS Information Repository in InfoRepo Discovery. This value is passed to
CORBA::ORB::string_to_object()and can be any Object URL type understandable by TAO (file, IOR, corbaloc, corbaname). A simplified endpoint description of the form<host>:<port>is also accepted, which is equivalent tocorbaloc::<host>:<port>/DCPSInfoRepo.
- DCPSLivelinessFactor=<n>¶
- Config store key:
COMMON_DCPS_LIVELINESS_FACTORDefault:80Percent of the Liveliness QoS lease duration after which a liveliness message is sent. A value of
80implies a 20% cushion of latency from the last detected heartbeat message.
- DCPSLogLevel=none|error|warning|notice|info|debug¶
- Config store key:
COMMON_DCPS_LOG_LEVELDefault:warningGeneral logging control.
- none¶
See none log level
- error¶
See error log level
- warning¶
- notice¶
See notice log level
- info¶
See info log level
- debug¶
See debug log level
See Logging for details.
- DCPSMonitor=<boolean>¶
- Config store key:
COMMON_DCPS_MONITORDefault:0Use the Monitor library to publish data on monitoring topics (see
dds/monitor/README).
- DCPSPendingTimeout=<sec>¶
- Config store key:
COMMON_DCPS_PENDING_TIMEOUTDefault:0The maximum duration in seconds a data writer will block to allow unsent samples to drain on deletion. The default,
0, blocks indefinitely.
- DCPSPersistentDataDir=<path>¶
- Config store key:
COMMON_DCPS_PERSISTENT_DATA_DIRDefault:OpenDDS-durable-data-dirThe path to a directory on where durable data will be stored for PERSISTENT_DURABILITY_QOS. If the directory does not exist it will be created automatically.
- DCPSPublisherContentFilter=<boolean>¶
- Config store key:
COMMON_DCPS_PUBLISHER_CONTENT_FILTERDefault:1Controls the filter expression evaluation policy for content filtered topics. When the value is
1the publisher may drop any samples, before handing them off to the transport when these samples would have been ignored by all subscribers.
- DCPSSecurity=<boolean>¶
- Config store key:
COMMON_DCPS_SECURITYDefault:0This setting is only available when OpenDDS is compiled with DDS Security. If set to
1, enable DDS Security framework and built-in plugins. Each Domain Participant using security must be created with the correct property QoS.See DDS Security for more information.
- DCPSSecurityDebug=<cat>[,<cat>]...¶
- Config store key:
COMMON_DCPS_SECURITY_DEBUGDefault:0(No security logging)This setting is only available when OpenDDS is compiled with DDS Security enabled. This controls the security debug logging granularity by category.
- DCPSSecurityDebugLevel=<n>¶
- Config store key:
COMMON_DCPS_SECURITY_DEBUG_LEVELDefault:0(No security logging)This setting is only available when OpenDDS is compiled with DDS Security enabled. This controls the security debug logging granularity by debug level.
- DCPSSecurityFakeEncryption=<boolean>¶
- Config store key:
COMMON_DCPS_SECURITY_FAKE_ENCRYPTIONDefault:0(Real encryption when that’s setup)This setting is only available when OpenDDS is compiled with DDS Security enabled. This option, when set to
1, disables all encryption by making encryption and decryption no-ops. OpenDDS still generates keys and performs other security bookkeeping, so this option is useful for debugging the security infrastructure by making it possible to manually inspect all messages.
- DCPSThreadStatusInterval=<sec>¶
- Config store key:
COMMON_DCPS_THREAD_STATUS_INTERVALDefault:0(disabled)Enable internal thread status reporting using the specified reporting interval, in seconds.
- DCPSTransportDebugLevel=<n>¶
- Config store key:
COMMON_DCPS_TRANSPORT_DEBUG_LEVELDefault:0(disabled)Integer value that controls the amount of debug information the transport layer logs. Valid values are
0through5.
- DCPSTypeObjectEncoding=Normal|WriteOldFormat|ReadOldFormat¶
- Config store key:
COMMON_DCPS_TYPE_OBJECT_ENCODINGDefault:NormalFrom when XTypes was first implemented in OpenDDS from 3.16.0 until 3.18.0, there was a bug in the encoding and decoding of
TypeObjectand related data types for representing user types. This was fixed in 3.18.0, but if an application needs to be compatible with an application built with 3.16 or 3.17, then it can use this option to do that and migrate to the correct encoding without taking everything down all at once.- WriteOldFormat¶
This setting makes OpenDDS use the incorrect encoding. To start to migrate an existing set of OpenDDS applications, this should be the setting of applications using OpenDDS 3.18 or later.
- ReadOldFormat¶
This setting allows OpenDDS to read the incorrect encoding, but it will always write the correct one. Once all application using OpenDDS 3.16 or 3.17 have been upgraded to OpenDDS 3.18 or later,
WriteOldFormatcan be set to communicate withReadOldFormatandNormal.
- Normal¶
The default, correct encoding is used. Once all applications are using both OpenDDS 3.18 or later and
ReadOldFormat, thenNormalcan be used.
- ORBLogFile=<path>¶
- Config store key:
COMMON_ORB_LOG_FILEDefault: Output to standard error stream on most platformsChange log message destination to the file specified, which is opened in appending mode. [1]
- ORBVerboseLogging=0|1|2¶
- Config store key:
COMMON_ORB_VERBOSE_LOGGINGDefault:0Add a prefix to each log message, using a format defined by the ACE library: [1]
- 0¶
No prefix
- 1¶
Verbose “lite”, adds timestamp and priority
- 2¶
Verbose, in addition to “lite” has host name, PID, program name
- pool_size=<n_bytes>¶
- Config store key:
COMMON_POOL_SIZEDefault:41943040bytes (40 MiB)Size of Safety Profile memory pool, in bytes.
- pool_granularity=<n_bytes>¶
- Config store key:
COMMON_POOL_GRANULARITYDefault:8Granularity of Safety Profile memory pool in bytes. Must be multiple of 8.
- Scheduler=SCHED_RR|SCHED_FIFO|SCHED_OTHER¶
- Config store key:
COMMON_SCHEDULERDefault:SCHED_OTHERSelects the scheduler to use for transport sending threads. Setting the scheduler to a value other than the default requires privileges on most systems.
- SCHED_RR¶
Round robin scheduling algorithm
- SCHED_FIFO¶
Allows each thread to run until it either blocks or completes before switching to a different thread
- SCHED_OTHER¶
The default scheduler on most systems
- scheduler_slice=<usec>¶
- Config store key:
COMMON_SCHEDULER_SLICEDefault:0Some operating systems require a time slice value to be set when selecting a
Schedulerother than the default. For those systems, this option can be used to set a value in microseconds.
Discovery Configuration¶
In DDS implementations, participants are instantiated in application processes and must discover one another in order to communicate. A DDS implementation uses the feature of domains to give context to the data being exchanged between DDS participants in the same domain. When DDS applications are written, participants are assigned to a domain and need to ensure their configuration allows each participant to discover the other participants in the same domain.
OpenDDS offers a centralized discovery mechanism, a peer-to-peer discovery mechanism, and a static discovery mechanism.
The centralized mechanism uses a separate service running a DCPSInfoRepo process.
The RTPS peer-to-peer mechanism uses the RTPS discovery protocol standard to achieve non-centralized discovery.
The static discovery mechanism uses the configuration file to determine which writers and readers should be associated and uses the underlying transport to determine which writers and readers exist.
A number of configuration options exist to meet the deployment needs of DDS applications.
Except for static discovery, each mechanism uses default values if no configuration is supplied either via the command line or configuration file.
The following sections show how to configure the advanced discovery capabilities.
For example, some deployments may need to use multiple DCPSInfoRepo services or RTPS discovery to satisfy interoperability requirements.
Domain Configuration¶
An OpenDDS configuration file uses the [domain] section type to configure one or more discovery domains with each domain pointing to a discovery configuration in the same file or a default discovery configuration.
OpenDDS applications can use a centralized discovery approach using the DCPSInfoRepo service or a peer-to-peer discovery approach using the RTPS discovery protocol standard or a combination of the two in the same deployment.
A single domain can refer to only one type of discovery section.
See Configuring for InfoRepo Discovery for configuring InfoRepo Discovery, Configuring for RTPS Discovery for configuring RTPS Discovery, and Configuring for Static Discovery for configuring Static Discovery.
Ultimately a domain is assigned an integer value and a configuration file can support this in two ways. The first is to simply make the instance value the integer value assigned to the domain as shown here:
[domain/1]
DiscoveryConfig=DiscoveryConfig1
(more properties...)
Our example configures a single domain identified by the domain keyword and followed by an instance value of /1.
The instance value after the slash in this case is the integer value assigned to the domain.
An alternative syntax for this same content is to use a more recognizable (friendly) name instead of a number for the domain name and then add the [domain] DomainId property to the section to give the integer value.
Here is an example:
[domain/books]
DomainId=1
DiscoveryConfig=DiscoveryConfig1
The domain is given a friendly name of books.
The [domain] DomainId property assigns the integer value of 1 needed by a DDS application reading the configuration.
Multiple domain instances can be identified in a single configuration file in this format.
Once one or more domain instances are established, the discovery properties must be identified for that domain.
The [domain] DiscoveryConfig property must either point to another section that holds the discovery configuration or specify one of the internal default values for discovery.
The instance name in our example is DiscoveryConfig1.
This instance name must be associated with a section type of either [repository] or [rtps_discovery].
Here is an extension of our example:
[domain/1]
DiscoveryConfig=DiscoveryConfig1
[repository/DiscoveryConfig1]
RepositoryIor=host1.mydomain.com:12345
In this case our domain points to a [repository] section which is used for an OpenDDS DCPSInfoRepo service.
See Configuring for InfoRepo Discovery for more details.
There are going to be occasions when specific domains are not identified in the configuration file. For example, if an OpenDDS application assigns a domain ID of 3 to its participants and the above example does not supply a configuration for domain id of 3 then the following can be used:
[common]
DCPSInfoRepo=host3.mydomain.com:12345
DCPSDefaultDiscovery=DEFAULT_REPO
[domain/1]
DiscoveryConfig=DiscoveryConfig1
[repository/DiscoveryConfig1]
RepositoryIor=host1.mydomain.com:12345
The DCPSDefaultDiscovery and DCPSInfoRepo properties tell the application that every participant that doesn’t have a domain id found in the configuration file to use the The DCPS Information Repository at host3.mydomain.com:12345.
As shown in Common Configuration Properties the DCPSDefaultDiscovery property has three other values that can be used.
The DEFAULT_RTPS constant value informs participants that don’t have a domain configuration to use RTPS discovery to find other participants.
Similarly, the DEFAULT_STATIC constant value informs the participants that don’t have a domain configuration to use static discovery to find other participants.
The final option for the DCPSDefaultDiscovery property is to tell an application to use one of the defined discovery configurations to be the default configuration for any participant domain that isn’t called out in the file.
Here is an example:
[common]
DCPSDefaultDiscovery=DiscoveryConfig2
[domain/1]
DiscoveryConfig=DiscoveryConfig1
[repository/DiscoveryConfig1]
RepositoryIor=host1.mydomain.com:12345
[domain/2]
DiscoveryConfig=DiscoveryConfig2
[repository/DiscoveryConfig2]
RepositoryIor=host2.mydomain.com:12345
By adding the DCPSDefaultDiscovery property to the [common] section, any participant that hasn’t been assigned to a domain id of 1 or 2 will use the configuration of DiscoveryConfig2.
For more explanation of a similar configuration for RTPS discovery see Configuring for RTPS Discovery.
- [domain/<id>]¶
- DomainId=<n>¶
- Config store key:
DOMAIN_<id>_DOMAIN_IDRequiredAn integer value representing a domain being associated with a repository.
- DomainRepoKey=<k>¶
- Config store key:
DOMAIN_<id>_DOMAIN_REPO_KEYKey value of the mapped repository
Deprecated since version 3.1.0: Provided for backward compatibility.
- DiscoveryConfig=<name>¶
- Config store key:
DOMAIN_<id>_DISCOVERY_CONFIGDefault:[common] DCPSDefaultDiscoverySets the discovery configuration for this domain. It uses the same values as
[common] DCPSDefaultDiscovery.
- DefaultTransportConfig=<name>¶
- Config store key:
DOMAIN_<id>_DEFAULT_TRANSPORT_CONFIGA user-defined string that refers to the instance name of a
[config]section. See Transport Configuration.
Configuring for InfoRepo Discovery¶
This section describes the configuration properties for InfoRepo Discovery.
Assume for example that the The DCPS Information Repository is started on a host and port of myhost.mydomain.com:12345.
Applications can make their OpenDDS participants aware of how to find this service through command line options or by reading a configuration file.
In Running the Example the executables were given a command line parameter to find the DCPSInfoRepo service like so:
publisher -DCPSInfoRepo file://repo.ior
This assumes that the DCPSInfoRepo has been started with the following syntax:
$DDS_ROOT/bin/DCPSInfoRepo -o repo.ior
%DDS_ROOT%\bin\DCPSInfoRepo -o repo.ior
The DCPSInfoRepo service generates its location object information in this file and participants need to read this file to ultimately connect.
The use of file based IORs to find a discovery service, however, is not practical in most production environments, so applications instead can use a command line option like the following to simply point to the host and port where the DCPSInfoRepo is running.
publisher -DCPSInfoRepo myhost.mydomain.com:12345
The above assumes that the DCPSInfoRepo has been started on a host (myhost.mydomain.com) as follows:
$DDS_ROOT/bin/DCPSInfoRepo -ORBListenEndpoints iiop://:12345
%DDS_ROOT%\bin\DCPSInfoRepo -ORBListenEndpoints iiop://:12345
If an application needs to use a configuration file for other settings, it would become more convenient to place discovery content in the file and reduce command line complexity and clutter.
The use of a configuration file also introduces the opportunity for multiple application processes to share common OpenDDS configuration.
The above example can easily be moved to the [common] section of a configuration file (assume a file of pub.ini):
[common]
DCPSInfoRepo=myhost.mydomain.com:12345
The command line to start our executable would now change to the following:
publisher -DCSPConfigFile pub.ini
A configuration file can specify domains with discovery configuration assigned to those domains.
In this case the [repository] RepositoryIor property is used to take the same information that would be supplied on a command line to point to a running DCPSInfoRepo service.
Two domains are configured here:
[domain/1]
DiscoveryConfig=DiscoveryConfig1
[repository/DiscoveryConfig1]
RepositoryIor=myhost.mydomain.com:12345
[domain/2]
DiscoveryConfig=DiscoveryConfig2
[repository/DiscoveryConfig2]
RepositoryIor=host2.mydomain.com:12345
The [domain] DiscoveryConfig property under [domain/1] instructs all participants in domain 1 to use the configuration defined in an instance called DiscoveryConfig1.
In the above, this is mapped to a [repository] section that gives the RepositoryIor value of myhost.mydomain.com:12345.
Finally, when configuring a DCPSInfoRepo the DiscoveryConfig property under a domain instance entry can also contain the value of DEFAULT_REPO which instructs a participant using this instance to use the definition of the property DCPSInfoRepo wherever it has been supplied.
Consider the following configuration file as an example:
[common]
DCPSInfoRepo=localhost:12345
[domain/1]
DiscoveryConfig=DiscoveryConfig1
[repository/DiscoveryConfig1]
RepositoryIor=myhost.mydomain.com:12345
[domain/2]
DiscoveryConfig=DEFAULT_REPO
In this case any participant in domain 2 would be instructed to refer to the discovery property of DCPSInfoRepo, which is defined in the [common] section of our example.
If the DCPSInfoRepo value is not supplied in the [common] section, it could alternatively be supplied as a parameter to the command line like so:
publisher -DCPSInfoRepo localhost:12345 -DCPSConfigFile pub.ini
This sets the value of DCPSInfoRepo such that if participants reading the configuration file pub.ini encounters DEFAULT_REPO, there is a value for it.
If DCPSInfoRepo is not defined in a configuration file or on the command line, then the OpenDDS default value for DCPSInfoRepo is file://repo.ior.
As mentioned prior, this is not likely to be the most useful in production environments and should lead to setting the value of DCPSInfoRepo by one of the means described in this section.
Configuring for Multiple DCPSInfoRepo Instances¶
The DDS entities in a single OpenDDS process can be associated with multiple DCPS information repositories (DCPSInfoRepo).
The repository information and domain associations can be configured using a configuration file, or via application API.
Internal defaults, command line arguments, and configuration file options will work as-is for existing applications that do not want to use multiple DCPSInfoRepo associations.
The following is an example of a process that uses multiple DCPSInfoRepo repositories.
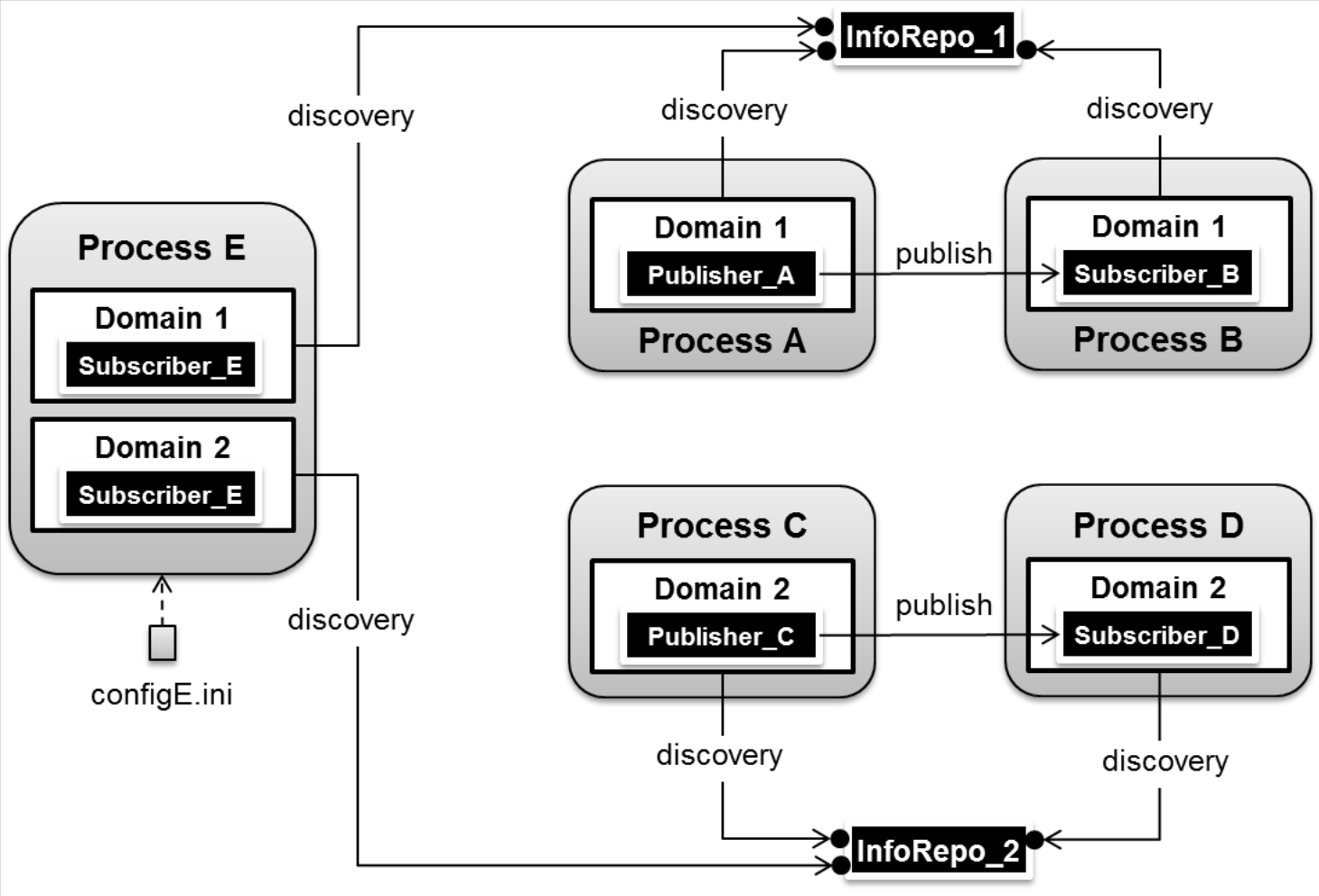
Multiple DCPSInfoRepo Configuration¶
Processes A and B are typical application processes that have been configured to communicate with one another and discover one another in InfoRepo_1.
This is a simple use of basic discovery.
However, an additional layer of context has been applied with the use of a specified domain (Domain 1).
DDS entities (data readers/data writers) are restricted to communicate to other entities within that same domain.
This provides a useful method of separating traffic when needed by an application.
Processes C and D are configured the same way, but operate in Domain 2 and use InfoRepo_2.
The challenge comes when you have an application process that needs to use multiple domains and have separate discovery services.
This is Process E in our example.
It contains two subscribers, one subscribing to publications from InfoRepo_1 and the other subscribing to publications in InfoRepo_2.
What allows this configuration to work can be found in the configE.ini file.
We will now look at the configuration file (referred to as configE.ini) to demonstrate how Process E can communicate to both domains and separate DCPSInfoRepo services.
For this example we will only show the discovery aspects of the configuration and not show transport content.
[domain/1]
DiscoveryConfig=DiscoveryConfig1
[repository/DiscoveryConfig1]
RepositoryIor=host1.mydomain.com:12345
[domain/2]
DiscoveryConfig=DiscoveryConfig2
[repository/DiscoveryConfig2]
RepositoryIor=host2.mydomain.com:12345
When Process E reads in the above configuration it finds the occurrence of multiple domain sections.
As described in Domain Configuration each domain has an instance integer and a property of [domain] DiscoveryConfig defined.
For the first domain ([domain/1]), the DiscoveryConfig property is supplied with the user-defined name of DiscoveryConfig1 value.
This property causes the OpenDDS implementation to find a section title of either repository or rtps_discovery and an instance name of DiscoveryConfig1.
In our example, a [repository/DiscoveryConfig1] section title is found and this becomes the discovery configuration for domain instance [domain/1] (integer value 1).
The section found now tells us that the address of the DCPSInfoRepo that this domain should use can be found by using the RepositoryIor property value.
In particular it is host1.mydomain.com and port 12345.
The values of the RepositoryIor can be a full CORBA IOR or a simple host:port string.
A second domain section title [domain/2] is found in this configuration file along with it’s corresponding repository section [repository/DiscoveryConfig2] that represents the configuration for the second domain of interest and the InfoRepo_2 repository.
There may be any number of repository or domain sections within a single configuration file.
Note
Domains not explicitly configured are automatically associated with the default discovery configuration.
Note
Individual DCPSInfoRepos can be associated with multiple domains, however domains cannot be shared between multiple DCPSInfoRepos.
Here are the valid properties for a [repository] section:
- [repository/<inst_name>]¶
- RepositoryIor=<ior>¶
- Config store key:
REPOSITORY_<inst_name>_REPOSITORY_IORRepository IOR or host:port
- RepositoryKey=<key>¶
- Config store key:
REPOSITORY_<inst_name>_REPOSITORY_KEYUnique key value for the repository
Deprecated since version 3.1.0: Provided for backward compatibility.
Configuring for RTPS Discovery¶
This section describes the configuration properties for RTPS Discovery.
To configure RTPS discovery, it’s helpful to understand that it is composed of two distinct protocols:
- Simple Participant Discovery Protocol (SPDP)
This protocol is how RTPS participants
discover each otherand let each other knowthey're still available. They also use it to exchange basic information about each other such as the domain id and addresses to use to communicate. More about SPDP can be found in RTPS v2.3 8.5.3 The Simple Participant Discovery Protocol.
- Simple Endpoint Discovery Protocol (SEDP)
This protocol is how RTPS participants exchange information about their DataReaders and DataWriters, including their Quality of Service. More about SEDP can be found in RTPS v2.3 8.5.4 The Simple Endpoint Discovery Protocol.
RTPS discovery can be configured for a single domain or for multiple domains as was done in Configuring for Multiple DCPSInfoRepo Instances.
A simple configuration is achieved by specifying a property in the [common] section of our example configuration file.
[common]
DCPSDefaultDiscovery=DEFAULT_RTPS
All default values for RTPS discovery are adopted in this form.
A variant of this same basic configuration is to specify a section to hold more specific parameters of RTPS discovery.
The following example uses the [common] section to point to an instance of an [rtps_discovery] section followed by an instance name of TheRTPSConfig which is supplied by the user.
[common]
DCPSDefaultDiscovery=TheRTPSConfig
[rtps_discovery/TheRTPSConfig]
ResendPeriod=5
The instance [rtps_discovery/TheRTPSConfig] is now the location where properties that vary the default RTPS settings get specified.
In our example the ResendPeriod=5 entry sets the number of seconds between periodic announcements of available data readers / data writers and to detect the presence of other data readers / data writers on the network.
This would override the default of 30 seconds.
If your OpenDDS deployment uses multiple domains, the following configuration approach combines the use of the [domain] section title with [rtps_discovery] to allow a user to specify particular settings by domain.
It might look like this:
[common]
DCPSDebugLevel=0
[domain/1]
DiscoveryConfig=DiscoveryConfig1
[rtps_discovery/DiscoveryConfig1]
ResendPeriod=5
[domain/2]
DiscoveryConfig=DiscoveryConfig2
[rtps_discovery/DiscoveryConfig2]
ResendPeriod=5
SedpMulticast=0
Some important implementation notes regarding RTPS discovery in OpenDDS are as follows:
Domain IDs should be between 0 and 231 (inclusive) due to the way UDP ports are assigned to domain IDs. In each OpenDDS process, up to 120 domain participants are supported in each domain.
The Multicast Transport does not work with RTPS Discovery due to the way GUIDs are assigned (a warning will be issued if this is attempted).
The OMG RTPS specification details several properties that can be adjusted from their defaults that influence the behavior of RTPS discovery. Those properties, along with options specific to OpenDDS’s RTPS discovery implementation, are listed below.
- [rtps_discovery/<inst_name>]¶
- ResendPeriod=<sec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_RESEND_PERIODDefault:30The number of seconds that a process waits between the SPDP participant announcements. It is a floating point value, so fractions of a second can be specified.
- MinResendDelay=<msec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_MIN_RESEND_DELAYDefault:100The minimum time in milliseconds between SPDP participant announcements.
- QuickResendRatio=<frac>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_QUICK_RESEND_RATIODefault:0.1Tuning parameter that configures local SPDP participant announcement resends as a fraction of the resend period. When a new participant is discovered, the
ResendPeriodis shorted by multiplying with theQuickResendRatiofor the next announcement. Thus, ifResendPeriodwas 30 andQuickResendRatiois .1, then the resend period would go down to 3 seconds when a new participant is discovered.
- LeaseDuration=<sec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_LEASE_DURATIONDefault:300(5 minutes)Sent as part of the SPDP participant announcement. It tells the peer participants that if they don’t hear from this participant for the specified duration, then this participant can be considered “not alive”.
- MaxLeaseDuration=<sec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_MAX_LEASE_DURATIONDefault:300(5 minutes)If set, limit the lease duration requested by a discovered participant to this value.
- MinimumCleanupSeparation=<msec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_MINIMUM_CLEANUP_SEPARATIONDefault:1(1 millisecond)Ensure that attempts to clean up expired participants are separated by this amount of time.
- SecurityUnsecureLeaseDuration=<sec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SECURITY_UNSECURE_LEASE_DURATIONDefault:30(30 seconds)Limit the lease duration requested by a discovered participant when bootstrapping discovery from an SPDP message.
- LeaseExtension=<sec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_LEASE_EXTENSIONDefault:0Extends the lease of discovered participants by the set amount of seconds. Useful on spotty connections to reduce load on the RtpsRelay.
- PB=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_PBDefault:7400The port base parameter for the computed RTPS ports.
- DG=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_DGDefault:250The domain gain coefficient parameter for the computed RTPS ports.
- PG=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_PGDefault:2The participant gain coefficient parameter for the computed RTPS ports.
- D0=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_D0Default: The value of theOPENDDS_RTPS_DEFAULT_D0environment variable if set, else0The offset parameter for the computed SPDP multicast port.
- D1=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_D1Default:10The offset parameter for the computed SPDP unicast port.
- DX=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_DXDefault:2The offset parameter for the computed SEDP multicast port.
- DY=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_DYDefault:12The offset parameter for the computed SEDP unicast port.
- SpdpPortMode=system|probe¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_PORT_MODEDefault:systemWhen
SpdpLocalAddressandIpv6SpdpLocalAddressdon’t explicitly set the ports, they are assigned according to one of these methods:- system¶
The operating system assigns one when the socket is opened.
- SpdpRequestRandomPort=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_REQUEST_RANDOM_PORTDefault:00is the same asSpdpPortMode=probeand1is the same asSpdpPortMode=system.Deprecated since version 3.29.0: Use
SpdpPortModeinstead.
- SedpPortMode=system|probe¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_PORT_MODEDefault:systemWhen
SedpLocalAddressandIpv6SedpLocalAddressdon’t explicitly set the ports, they are assigned according to one of these methods:- system¶
The operating system assigns one when the socket is opened.
- SedpMaxMessageSize=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_MAX_MESSAGE_SIZEDefault:65466(maximum worst-case UDP payload size)Set the maximum SEDP message size.
- SedpMulticast=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_MULTICASTDefault:1Determines whether multicast can be used for SEDP traffic. When set to
1, Multicast is used. When set to0, Unicast is used.
- SedpMulticastAddress=<host>[:<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_MULTICAST_ADDRESSDefault:InteropMulticastOverrideThe multicast group to use for SEDP multicast traffic. If
<port>is0or not specified, it is calculated as described in SEDP Multicast.
- Ipv6SedpMulticastAddress=<host>[:<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_IPV6_SEDP_MULTICAST_ADDRESSDefault:Ipv6DefaultMulticastGroupIPv6 variant of
SedpMulticastAddress.
- SedpLocalAddress=<host>:[<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressConfigure the transport instance created and used by SEDP to bind to the specified local address and port. In order to leave the port unspecified, it can be omitted from the setting but the trailing
:must be present. If<port>is0or not specified, it is calculated as described in SEDP Unicast.
- Ipv6SedpLocalAddress=<host>:[<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_IPV6_SEDP_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressIPv6 variant of
SedpLocalAddress.
- SpdpMulticastAddress=<host>[:<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_MULTICAST_ADDRESSDefault:InteropMulticastOverrideThe multicast group to use for SPDP multicast traffic. If
<port>is0or not specified, it is calculated as described in SPDP Multicast.
- Ipv6SpdpMulticastAddress=<host>[:<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_IPV6_SPDP_MULTICAST_ADDRESSDefault:Ipv6DefaultMulticastGroupIPv6 variant of
Ipv6SpdpMulticastAddress.
- SpdpLocalAddress=<host>[:<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressAddress of a local interface, which will be used by SPDP to bind to that specific interface. If
<port>is0or not specified, it is calculated as described in SPDP Unicast.
- Ipv6SpdpLocalAddress=<host>[:<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_IPV6_SPDP_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressIPv6 variant of
SpdpLocalAddress.
- SedpAdvertisedLocalAddress=<host>:[<port>]¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_ADVERTISED_LOCAL_ADDRESSSets the address advertised by SEDP. Typically used when the participant is behind a firewall or NAT. In order to leave the port unspecified, it can be omitted from the setting but the trailing
:must be present.
- SedpSendDelay=<msec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_SEND_DELAYDefault:10Time in milliseconds for a built-in SEDP Writer to wait before sending data.
- SedpHeartbeatPeriod=<msec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_HEARTBEAT_PERIODDefault:200Time in milliseconds for a built-in SEDP Writer to announce the availability of data.
- SedpNakResponseDelay=<msec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_NAK_RESPONSE_DELAYDefault:100Time in milliseconds for a built-in SEDP Writer to delay the response to a negative acknowledgment.
- SpdpSendAddrs=<host>:<port>[,<host>:<port>]...¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_SEND_ADDRSA list (comma or whitespace separated) of
<host>:<port>pairs used as destinations for SPDP messages. This can be a combination of Unicast and Multicast addresses.
- MaxSpdpSequenceMsgResetChecks=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_MAX_SPDP_SEQUENCE_MSG_RESET_CHECKSDefault:3Remove a discovered participant after this number of SPDP messages with earlier sequence numbers.
- PeriodicDirectedSpdp=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_PERIODIC_DIRECTED_SPDPDefault:0(disabled)A boolean value that determines whether directed SPDP messages are sent to all participants once every resend period. This setting should be enabled for participants that cannot use multicast to send SPDP announcements, e.g., an RtpsRelay.
- UndirectedSpdp=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_UNDIRECTED_SPDPDefault:1(enabled)A boolean value that determines whether undirected SPDP messages are sent. This setting should be disabled for participants that cannot use multicast to send SPDP announcements, e.g., an RtpsRelay.
- InteropMulticastOverride=<group_address>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_INTEROP_MULTICAST_OVERRIDEDefault:239.255.0.1A network address specifying the multicast group to be used for SPDP and SEDP. The default is defined by the RTPS specification. This property can be used, for example, to specify use of a routed group address to provide a larger discovery scope. It can be modified by
[Customization] InteropMulticastOverride. It is the default host forSpdpMulticastAddressandSedpMulticastAddress.
- Ipv6DefaultMulticastGroup=<group_address>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_IPV6_DEFAULT_MULTICAST_GROUPDefault:ff03::1IPv6-variant of
InteropMulticastOverride. It is the default host forIpv6SpdpMulticastAddressandIpv6SedpMulticastAddress.
- TTL=n¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_TTLDefault:1(all data is restricted to the local network)The value of the Time-To-Live (TTL) field of multicast datagrams sent as part of discovery. This value specifies the number of hops the datagram will traverse before being discarded by the network.
- MulticastInterface=<iface>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_MULTICAST_INTERFACEDefault:[common] DCPSDefaultAddressSpecifies the network interface to be used by this discovery instance. This uses a platform-specific format that identifies the network interface, but can be address assigned to that interface on most platforms.
- GuidInterface=<iface>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_GUID_INTERFACEDefault: The system / ACE library default is usedSpecifies the network interface to use when determining which local MAC address should appear in a GUID generated by this node.
- SpdpRtpsRelayAddress=<host>:<port>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_RTPS_RELAY_ADDRESS
- SpdpRtpsRelaySendPeriod=<sec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_RTPS_RELAY_SEND_PERIODDefault:30secondsSpecifies the interval between SPDP announcements sent to the RtpsRelay.
- SedpRtpsRelayAddress=host:port¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_RTPS_RELAY_ADDRESS
- RtpsRelayOnly=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_RTPS_RELAY_ONLYDefault:0(disabled)Only send RTPS message to the RtpsRelay (for debugging).
- UseRtpsRelay=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_USE_RTPS_RELAYDefault:0(disabled)Send messages to the RtpsRelay. Messages will only be sent if
SpdpRtpsRelayAddressand/orSedpRtpsRelayAddressare set.
- SpdpStunServerAddress=<host>:<port>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_STUN_SERVER_ADDRESSSpecifies the address of the STUN server to use for SPDP when using ICE.
- SedpStunServerAddress=<host>:<port>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_STUN_SERVER_ADDRESSSpecifies the address of the STUN server to use for SEDP when using ICE.
- UseIce=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_USE_ICEDefault:0(disabled)
- MaxAuthTime=<sec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_MAX_AUTH_TIMEDefault:300seconds (5 minutes)Set the maximum time for authentication with DDS Security.
- AuthResendPeriod=<sec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_AUTH_RESEND_PERIODDefault:1secondResend authentication messages for DDS Security after this amount of seconds. It is a floating point value, so fractions of a second can be specified.
- SecureParticipantUserData=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SECURE_PARTICIPANT_USER_DATADefault:0(disabled)If DDS Security is enabled, the Participant’s USER_DATA QoS is omitted from unsecured discovery messages.
- UseXTypes=no|minimal|complete¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_USE_X_TYPESDefault:minimalEnables discovery extensions from the XTypes specification. Participants exchange topic type information in endpoint announcements and extended type information using the Type Lookup Service.
See Representing Types with TypeObject and DynamicType for more information on
CompleteTypeObjectand its use in the dynamic binding.- no¶
XTypes isn’t taken into consideration during discovery.
0can also be used for backwards compatibility.
- minimal¶
XTypes is used for discovery when possible and only the
MinimalTypeObjectis provided to remote participants if available.1can also be used for backwards compatibility.
- complete¶
XTypes is used for discovery when possible and only the
CompleteTypeObjectis provided to remote participants if available. This requires thatopendds_idl -Gxtypes-completewas used when compiling the IDL.2can also be used for backwards compatibility.
- TypeLookupServiceReplyTimeout=<msec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_TYPE_LOOKUP_SERVICE_REPLY_TIMEOUTDefault:5000milliseconds (5 seconds).If
UseXTypesis enabled, then this sets the timeout for waiting for replies to remote Type Lookup Service requests.
- SedpResponsiveMode=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_RESPONSIVE_MODEDefault:0(disabled)Causes the built-in SEDP endpoints to send additional messages which may reduce latency.
- SedpPassiveConnectDuration=<msec>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_PASSIVE_CONNECT_DURATIONDefault:60000milliseconds (1 minute)Sets the duration that a passive endpoint will wait for a connection.
- SendBufferSize=<bytes>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEND_BUFFER_SIZEDefault:0(system default value is used,65466typical)
- RecvBufferSize=<bytes>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_RECV_BUFFER_SIZEDefault:0(system default value is used,65466typical)
- MaxParticipantsInAuthentication=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_MAX_PARTICIPANTS_IN_AUTHENTICATIONDefault:0(no limit)This setting is only available when OpenDDS is compiled with DDS Security enabled. Limits the number of peer participants that can be concurrently in the process of authenticating – that is, not yet completed authentication.
- SedpReceivePreallocatedMessageBlocks=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_RECEIVE_PREALLOCATED_MESSAGE_BLOCKSDefault:0(use[transport] receive_preallocated_message_blocks’s default)Configure the
[transport] receive_preallocated_message_blocksattribute of SEDP’s transport.
- SedpReceivePreallocatedDataBlocks=<n>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SEDP_RECEIVE_PREALLOCATED_DATA_BLOCKSDefault:0(use[transport] receive_preallocated_data_blocks’s default)Configure the
[transport] receive_preallocated_data_blocksattribute of SEDP’s transport.
- CheckSourceIp=<boolean>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_CHECK_SOURCE_IPDefault:1(enabled)Incoming SPDP participant announcements are checked to verify that their source IP address matches one of:
An entry in the metatraffic locator list
The configured RtpsRelay (if any)
An ICE AgentInfo parameter
Announcements that don’t match any of these are dropped if this check is enabled.
- SpdpUserTag=<i>¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_SPDP_USER_TAGDefault:0(disabled)Add the OpenDDS-specific UserTag RTPS submessage to the start of SPDP messages. If
<i>is 0 (the default), the submessage is not added. Otherwise this submessage’s content is the 4-byte unsigned integer<i>. User tags from received SPDP messages are available to the application using the ParticipantLocation built-in topic.
- IgnoredSpdpUserTags=<t1>[,<t2>]...¶
- Config store key:
RTPS_DISCOVERY_<inst_name>_IGNORED_SPDP_USER_TAGSDefault: Empty listIncoming SPDP messages with a UserTag matching any of these values will be ignored.
Ports Used by RTPS Discovery¶
Simple Participant Discovery Protocol (SPDP)¶
SPDP Multicast¶
The SPDP multicast port will be one of the following:
Port from
SpdpMulticastAddressif set
SPDP Unicast¶
The SPDP unicast port will be one of the following:
Port from
SpdpLocalAddressif setA system-provided port if
SpdpPortMode=systemPB+DG× domainId +D1+PG× participantId ifSpdpPortMode=probe(default)participantId starts at 0 and if the port can not be opened, then the participantId is incremented until a port can be opened.
If no valid UDP port can be opened, then an error will be logged.
Simple Endpoint Discovery Protocol (SEDP)¶
SEDP Multicast¶
If SedpMulticast=1, the SEDP multicast port will be one of the following:
Port from
SedpMulticastAddressif set
SEDP Unicast¶
The SEDP unicast port will be one of the following:
Port from
SedpLocalAddressif setPB+DG× domainId +DY+PG× participantId ifSedpPortMode=probeparticipantId starts at 0 and if the port can not be opened, then the participantId is incremented until a port can be opened.
If no valid UDP port can be opened, then an error will be logged.
A system-provided port if
SedpPortMode=system(default)
Additional RTPS Discovery Features¶
The RTPS discovery implementation creates and manages a transport instance – specifically an object of class RtpsUdpInst.
In order for applications to access this object and enable advanced features, the RtpsDiscovery class provides the method sedp_transport_inst(domainId, participant).
Configuring for Static Discovery¶
Static discovery may be used when a DDS domain has a fixed number of processes and data readers/writers that are all known a priori. Data readers and writers are collectively known as endpoints. Using only the configuration file, the static discovery mechanism must be able to determine a network address and the QoS settings for each endpoint. The static discovery mechanism uses this information to determine all potential associations between readers and writers. A domain participant learns about the existence of an endpoint through hints supplied by the underlying transport.
Note
Currently, static discovery can only be used for endpoints using the RTPS/UDP Transport.
Static discovery introduces the following configuration file sections:
The
[topic]section is used to introduce a topic.The
[datawriterqos],[datareaderqos],[publisherqos], and[subscriberqos]sections are used to describe a QoS of the associated type.The
[endpoint]section describes a data reader or writer.
Data reader and writer objects must be identified by the user so that the static discovery mechanism can associate them with the correct [endpoint] section in the configuration file.
This is done by setting the User Data QoS of the DomainParticipantQos to an octet sequence of length 6.
The representation of this octet sequence occurs in the [endpoint] participant as a string with two hexadecimal digits per octet.
Similarly, the user_data of the DataReaderQos or DataWriterQos must be set to an octet sequence of length 3 corresponding to the entity value in the [endpoint/*] section.
For example, suppose the configuration file contains the following:
[topic/MyTopic]
type_name=TestMsg::TestMsg
[endpoint/MyReader]
type=reader
topic=MyTopic
config=MyConfig
domain=34
participant=0123456789ab
entity=cdef01
[config/MyConfig]
transports=MyTransport
[transport/MyTransport]
transport_type=rtps_udp
use_multicast=0
local_address=1.2.3.4:30000
The corresponding code to configure the DomainParticipantQos is:
DDS::DomainParticipantQos dp_qos;
domainParticipantFactory->get_default_participant_qos(dp_qos);
dp_qos.user_data.value.length(6);
dp_qos.user_data.value[0] = 0x01;
dp_qos.user_data.value[1] = 0x23;
dp_qos.user_data.value[2] = 0x45;
dp_qos.user_data.value[3] = 0x67;
dp_qos.user_data.value[4] = 0x89;
dp_qos.user_data.value[5] = 0xab;
The code to configure the DataReaderQos is similar:
DDS::DataReaderQos qos;
subscriber->get_default_datareader_qos(qos);
qos.user_data.value.length(3);
qos.user_data.value[0] = 0xcd;
qos.user_data.value[1] = 0xef;
qos.user_data.value[2] = 0x01;
The domain id, which is 34 in the example, should be passed to the call to create_participant.
In the example, the endpoint configuration for MyReader references MyConfig which in turn references MyTransport.
Transport configuration is described in Transport Configuration.
The important detail for static discovery is that at least one of the transports contains a known network address (1.2.3.4:30000).
An error will be issued if an address cannot be determined for an endpoint.
The static discovery implementation also checks that the QoS of a data reader or data writer object matches the QoS specified in the configuration file.
- [topic/<inst_name>]¶
- name=<name>¶
- Config store key:
TOPIC_<inst_name>_NAMEDefault: The<inst_name>of the topic sectionUse this to override the name of the topic in the DDS API.
- type_name=<name>¶
- Config store key:
TOPIC_<inst_name>_TYPE_NAMERequiredIdentifier which uniquely defines the sample type. This is typically a CORBA interface repository type name.
- [datawriterqos/<inst_name>]¶
- durability.kind=VOLATILE|TRANSIENT_LOCAL¶
- Config store key:
DATAWRITERQOS_<inst_name>_DURABILITY_KINDSee Durability QoS.
- deadline.period.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_DEADLINE_PERIOD_SECSee Deadline QoS.
- deadline.period.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_DEADLINE_PERIOD_NANOSECSee Deadline QoS.
- latency_budget.duration.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_LATENCY_BUDGET_DURATION_SECSee Latency Budget QoS.
- latency_budget.duration.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_LATENCY_BUDGET_DURATION_NANOSECSee Latency Budget QoS.
- liveliness.kind=AUTOMATIC|MANUAL_BY_TOPIC|MANUAL_BY_PARTICIPANT¶
- Config store key:
DATAWRITERQOS_<inst_name>_LIVELINESS_KINDSee Liveliness QoS.
- liveliness.lease_duration.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_LIVELINESS_LEASE_DURATION_SECSee Liveliness QoS.
- liveliness.lease_duration.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_LIVELINESS_LEASE_DURATION_NANOSECSee Liveliness QoS.
- reliability.kind=BEST_EFFORT|RELIABILE¶
- Config store key:
DATAWRITERQOS_<inst_name>_RELIABILITY_KINDSee Reliability QoS.
- reliability.max_blocking_time.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_RELIABILITY_MAX_BLOCKING_TIME_SECSee Reliability QoS.
- reliability.max_blocking_time.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_RELIABILITY_MAX_BLOCKING_TIME_NANOSECSee Reliability QoS.
- destination_order.kind=BY_SOURCE_TIMESTAMP|BY_RECEPTION_TIMESTAMP¶
- Config store key:
DATAWRITERQOS_<inst_name>_DESTINATION_ORDER_KIND
- history.kind=KEEP_LAST|KEEP_ALL¶
- Config store key:
DATAWRITERQOS_<inst_name>_HISTORY_KINDSee History QoS.
- history.depth=<numeric>¶
- Config store key:
DATAWRITERQOS_<inst_name>_HISTORY_DEPTHSee History QoS.
- resource_limits.max_samples=<numeric>¶
- Config store key:
DATAWRITERQOS_<inst_name>_RESOURCE_LIMITS_MAX_SAMPLESSee Resource Limits QoS.
- resource_limits.max_instances=<numeric>¶
- Config store key:
DATAWRITERQOS_<inst_name>_RESOURCE_LIMITS_MAX_INSTANCESSee Resource Limits QoS.
- resource_limits.max_samples_per_instance=<numeric>¶
- Config store key:
DATAWRITERQOS_<inst_name>_RESOURCE_LIMITS_MAX_SAMPLES_PER_INSTANCESee Resource Limits QoS.
- transport_priority.value=<numeric>¶
- Config store key:
DATAWRITERQOS_<inst_name>_TRANSPORT_PRIORITY_VALUE
- lifespan.duration.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_LIFESPAN_DURATION_SECSee Lifespan QoS.
- lifespan.duration.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAWRITERQOS_<inst_name>_LIFESPAN_DURATION_NANOSECSee Lifespan QoS.
- ownership.kind=SHARED|EXCLUSIVE¶
- Config store key:
DATAWRITERQOS_<inst_name>_OWNERSHIP_KINDSee Ownership QoS.
- ownership_strength.value=<numeric>¶
- Config store key:
DATAWRITERQOS_<inst_name>_OWNERSHIP_STRENGTH_VALUE
- [datareaderqos/<inst_name>]¶
- durability.kind=VOLATILE|TRANSIENT_LOCAL¶
- Config store key:
DATAREADERQOS_<inst_name>_DURABILITY_KINDSee Durability QoS.
- deadline.period.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAREADERQOS_<inst_name>_DEADLINE_PERIOD_SECSee Deadline QoS.
- deadline.period.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAREADERQOS_<inst_name>_DEADLINE_PERIOD_NANOSECSee Deadline QoS.
- latency_budget.duration.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAREADERQOS_<inst_name>_LATENCY_BUDGET_DURATION_SECSee Latency Budget QoS.
- latency_budget.duration.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAREADERQOS_<inst_name>_LATENCY_BUDGET_DURATION_NANOSECSee Latency Budget QoS.
- liveliness.kind=AUTOMATIC|MANUAL_BY_TOPIC|MANUAL_BY_PARTICIPANT¶
- Config store key:
DATAREADERQOS_<inst_name>_LIVELINESS_KINDSee Liveliness QoS.
- liveliness.lease_duration.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAREADERQOS_<inst_name>_LIVELINESS_LEASE_DURATION_SECSee Liveliness QoS.
- liveliness.lease_duration.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAREADERQOS_<inst_name>_LIVELINESS_LEASE_DURATION_NANOSECSee Liveliness QoS.
- reliability.kind=BEST_EFFORT|RELIABILE¶
- Config store key:
DATAREADERQOS_<inst_name>_RELIABILITY_KINDSee Reliability QoS.
- reliability.max_blocking_time.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAREADERQOS_<inst_name>_RELIABILITY_MAX_BLOCKING_TIME_SECSee Reliability QoS.
- reliability.max_blocking_time.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAREADERQOS_<inst_name>_RELIABILITY_MAX_BLOCKING_TIME_NANOSECSee Reliability QoS.
- destination_order.kind=BY_SOURCE_TIMESTAMP|BY_RECEPTION_TIMESTAMP¶
- Config store key:
DATAREADERQOS_<inst_name>_DESTINATION_ORDER_KIND
- history.kind=KEEP_LAST|KEEP_ALL¶
- Config store key:
DATAREADERQOS_<inst_name>_HISTORY_KINDSee History QoS.
- history.depth=<numeric>¶
- Config store key:
DATAREADERQOS_<inst_name>_HISTORY_DEPTHSee History QoS.
- resource_limits.max_samples=<numeric>¶
- Config store key:
DATAREADERQOS_<inst_name>_RESOURCE_LIMITS_MAX_SAMPLESSee Resource Limits QoS.
- resource_limits.max_instances=<numeric>¶
- Config store key:
DATAREADERQOS_<inst_name>_RESOURCE_LIMITS_MAX_INSTANCESSee Resource Limits QoS.
- resource_limits.max_samples_per_instance=<numeric>¶
- Config store key:
DATAREADERQOS_<inst_name>_RESOURCE_LIMITS_MAX_SAMPLES_PER_INSTANCESee Resource Limits QoS.
- time_based_filter.minimum_separation.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAREADERQOS_<inst_name>_TIME_BASED_FILTER_MINIMUM_SEPARATION_SEC
- time_based_filter.minimum_separation.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAREADERQOS_<inst_name>_TIME_BASED_FILTER_MINIMUM_SEPARATION_NANOSEC
- reader_data_lifecycle.autopurge_nowriter_samples_delay.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAREADERQOS_<inst_name>_READER_DATA_LIFECYCLE_AUTOPURGE_NOWRITER_SAMPLES_DELAY_SEC
- reader_data_lifecycle.autopurge_nowriter_samples_delay.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAREADERQOS_<inst_name>_READER_DATA_LIFECYCLE_AUTOPURGE_NOWRITER_SAMPLES_DELAY_NANOSEC
- reader_data_lifecycle.autopurge_dispose_samples_delay.sec=<numeric>|DURATION_INFINITE_SEC¶
- Config store key:
DATAREADERQOS_<inst_name>_READER_DATA_LIFECYCLE_AUTOPURGE_DISPOSE_SAMPLES_DELAY_SEC
- reader_data_lifecycle.autopurge_dispose_samples_delay.nanosec=<numeric>|DURATION_INFINITE_NANOSEC¶
- Config store key:
DATAREADERQOS_<inst_name>_READER_DATA_LIFECYCLE_AUTOPURGE_DISPOSE_SAMPLES_DELAY_NANOSEC
- [publisherqos/<inst_name>]¶
- presentation.access_scope=INSTANCE|TOPIC|GROUP¶
- Config store key:
PUBLISHERQOS_<inst_name>_PRESENTATION_ACCESS_SCOPESee Presentation QoS.
- presentation.coherent_access=true|false¶
- Config store key:
PUBLISHERQOS_<inst_name>_PRESENTATION_COHERENT_ACCESSSee Presentation QoS.
- presentation.ordered_access=true|false¶
- Config store key:
PUBLISHERQOS_<inst_name>_PRESENTATION_ORDERED_ACCESSSee Presentation QoS.
- partition.name=<name>[,<name>]...¶
- Config store key:
PUBLISHERQOS_<inst_name>_PARTITION_NAMESee Partition QoS.
- [subscriberqos/<inst_name>]¶
- presentation.access_scope=INSTANCE|TOPIC|GROUP¶
- Config store key:
SUBSCRIBERQOS_<inst_name>_PRESENTATION_ACCESS_SCOPESee Presentation QoS.
- presentation.coherent_access=true|false¶
- Config store key:
SUBSCRIBERQOS_<inst_name>_PRESENTATION_COHERENT_ACCESSSee Presentation QoS.
- presentation.ordered_access=true|false¶
- Config store key:
SUBSCRIBERQOS_<inst_name>_PRESENTATION_ORDERED_ACCESSSee Presentation QoS.
- partition.name=<name>[,<name>]...¶
- Config store key:
SUBSCRIBERQOS_<inst_name>_PARTITION_NAMESee Partition QoS.
- [endpoint/<inst_name>]¶
- domain=<numeric>¶
- Config store key:
ENDPOINT_<inst_name>_DOMAINRequiredDomain id for endpoint in range 0-231. Used to form GUID of endpoint.
- participant=<hexstring>¶
- Config store key:
ENDPOINT_<inst_name>_PARTICIPANTRequiredString of 12 hexadecimal digits. Used to form GUID of endpoint. All endpoints with the same domain/participant combination should be in the same process.
- entity=<hexstring>¶
- Config store key:
ENDPOINT_<inst_name>_ENTITYRequiredString of 6 hexadecimal digits. Used to form GUID of endpoint. The combination of domain/participant/entity should be unique.
- type=reader|writer¶
- Config store key:
ENDPOINT_<inst_name>_TYPERequiredDetermines if the entity is a data reader or data writer.
- topic=<inst_name>¶
- Config store key:
ENDPOINT_<inst_name>_TOPICRequiredThe
[topic]to use.
- datawriterqos=<inst_name>¶
- Config store key:
ENDPOINT_<inst_name>_DATAWRITERQOSThe
[datawriterqos]to use.
- datareaderqos=<inst_name>¶
- Config store key:
ENDPOINT_<inst_name>_DATAREADERQOSThe
[datareaderqos]to use.
- publisherqos=<inst_name>¶
- Config store key:
ENDPOINT_<inst_name>_PUBLISHERQOSThe
[publisherqos]to use.
- subscriberqos=<inst_name>¶
- Config store key:
ENDPOINT_<inst_name>_SUBSCRIBERQOSThe
[subscriberqos]to use.
- config=<inst_name>¶
- Config store key:
ENDPOINT_<inst_name>_CONFIGThe
[config]to use.
Transport Configuration¶
Beginning with OpenDDS 3.0, a new transport configuration design has been implemented. The basic goals of this design were to:
Allow simple deployments to ignore transport configuration and deploy using intelligent defaults (with no transport code required in the publisher or subscriber).
Enable flexible deployment of applications using only configuration files and command line options.
Allow deployments that mix transports within individual data writers and writers. Publishers and subscribers negotiate the appropriate transport implementation to use based on the details of the transport configuration, QoS settings, and network reachability.
Support a broader range of application deployments in complex networks.
Support optimized transport development (such as collocated and shared memory transports - note that these are not currently implemented).
Integrate support for the Reliability QoS policy with the underlying transport.
Whenever possible, avoid dependence on the ACE Service Configurator and its configuration files.
Unfortunately, implementing these new capabilities involved breaking of backward compatibility with OpenDDS transport configuration code and files from previous releases.
See docs/OpenDDS_3.0_Transition.txt for information on how to convert your existing application to use the new transport configuration design.
Overview¶
Transport Concepts¶
This section provides an overview of the concepts involved in transport configuration and how they interact.
Each data reader and writer uses a Transport Configuration consisting of an ordered set of Transport Instances. Each transport instance specifies a transport implementation and can customize the configuration parameters defined by that transport. Transport Configurations and Transport Instances are managed by the Transport Registry and can be created via configuration files or through programming APIs.
Transport Configurations can be specified for Domain Participants, Publishers, Subscribers, Data Writers, and Data Readers. When a Data Reader or Writer is enabled, it uses the most specific configuration it can locate, either directly bound to it or accessible through its parent entity. For example, if a Data Writer specifies a Transport Configuration, it always uses it. If the Data Writer does not specify a configuration, it tries to use that of its Publisher or Domain Participant in that order. If none of these entities have a transport configuration specified, the Global Transport Configuration is obtained from the Transport Registry. The Global Transport Configuration can be specified by the user via either configuration file, command line option, or a member function call on the Transport Registry. If not defined by the user, a default transport configuration is used which contains all available transport implementations with their default configuration parameters. If you don’t specifically load or link in any other transport implementations, OpenDDS uses the TCP Transport for all communication.
How OpenDDS Selects a Transport¶
Currently, the behavior for OpenDDS is that Data Writers actively connect to Data Readers, which are passively awaiting those connections. Data Readers “listen” for connections on each of the Transport Instances that are defined in their Transport Configuration. Data Writers use their Transport Instances to “connect” to those of the Data Readers. Because the logical connections discussed here don’t correspond to the physical connections of the transport, OpenDDS often refers to them as Data Links.
When a Data Writer tries to connect to a Data Reader, it first attempts to see if there is an existing data link that it can use to communicate with that Data Reader. The Data Writer iterates (in definition order) through each of its Transport Instances and looks for an existing data link to the Transport Instances that the reader defined. If an existing data link is found it is used for all subsequent communication between the Data Writer and Reader.
If no existing data link is found, the Data Writer attempts to connect using the different Transport Instances in the order they are defined in its Transport Configuration. Any Transport Instances not “matched” by the other side are skipped. For example, if the writer specifies udp and tcp transport instances and the reader only specifies tcp, the udp transport instance is ignored. Matching algorithms may also be affected by QoS, configuration of the instances, and other specifics of the transport implementation. The first pair of Transport Instances that successfully “connect” results in a data link that is used for all subsequent data sample publication.
Configuration File Examples¶
The following examples explain the basic features of transport configuration via files and describe some common use cases. These are followed by full reference documentation for these features.
Single Transport Configuration¶
The simplest way to provide a transport configuration for your application is to use the OpenDDS configuration file. Here is a sample configuration file that might be used by an application running on a computer with two network interfaces that only wants to communicate using one of them:
[common]
DCPSGlobalTransportConfig=myconfig
[config/myconfig]
transports=mytcp
[transport/mytcp]
transport_type=tcp
local_address=myhost
This file does the following (starting from the bottom up):
Defines a transport instance named
mytcpwith a transport type of tcp and the local address specified asmyhost, which is the host name corresponding to the network interface we want to use.Defines a transport configuration named
myconfigthat uses the transport instancemytcpas its only transport.Makes the transport configuration named
myconfigthe global transport configuration for all entities in this process.
A process using this configuration file utilizes our customized transport configuration for all Data Readers and Writers created by it (unless we specifically bind another configuration in the code as described in Using Multiple Configurations).
Using Mixed Transports¶
This example configures an application to primarily use multicast and to “fall back” to tcp when it is unable to use multicast. Here is the configuration file:
[common]
DCPSGlobalTransportConfig=myconfig
[config/myconfig]
transports=mymulticast,mytcp
[transport/mymulticast]
transport_type=multicast
[transport/mytcp]
transport_type=tcp
The transport configuration named myconfig now includes two transport instances, mymulticast and mytcp.
Neither of these transport instances specify any parameters besides [transport] transport_type, so they use the default configuration of these transport implementations.
Users are free to use any of the transport-specific configuration parameters that are listed in the following reference sections.
Assuming that all participating processes use this configuration file, the application attempts to use multicast to initiate communication between data writers and readers. If the initial multicast communication fails for any reason (possibly because an intervening router is not passing multicast traffic) tcp is used to initiate the connection.
Using Multiple Configurations¶
For many applications, one configuration is not equally applicable to all communication within a given process. These applications must create multiple Transport Configurations and then assign them to the different entities of the process.
For this example consider an application hosted on a computer with two network interfaces that requires communication of some data over one interface and the remainder over the other interface. Here is our configuration file:
[common]
DCPSGlobalTransportConfig=config_a
[config/config_a]
transports=tcp_a
[config/config_b]
transports=tcp_b
[transport/tcp_a]
transport_type=tcp
local_address=hosta
[transport/tcp_b]
transport_type=tcp
local_address=hostb
Assuming hosta and hostb are the host names assigned to the two network interfaces, we now have separate configurations that can use tcp on the respective networks.
The above file sets the config_a configuration as the default, meaning we must manually bind any entities we want to use the other side to the config_b configuration.
OpenDDS provides two mechanisms to assign configurations to entities:
Via source code by attaching a configuration to an entity
Via configuration file by associating a configuration with a domain
Here is the source code mechanism (using a domain participant):
DDS::DomainParticipant_var dp =
dpf->create_participant(MY_DOMAIN,
PARTICIPANT_QOS_DEFAULT,
DDS::DomainParticipantListener::_nil(),
OpenDDS::DCPS::DEFAULT_STATUS_MASK);
OpenDDS::DCPS::TransportRegistry::instance()->bind_config("config_b", dp);
Any Data Writers or Readers owned by this Domain Participant should now use the config_b configuration.
When directly binding a configuration to a data writer or reader, the bind_config call must occur before the reader or writer is enabled.
This is because the configuration is fixed on enable() and this is done automatically by default when an entity is created.
This is not an issue when binding configurations to domain participants, publishers, or subscribers.
Setting Entity Factory QoS autoenable_created_entities on the publisher or subscriber to false is required to use bind_config succesfully on a reader or writer.
For example:
DDS::PublisherQos pub_qos;
participant->get_default_publisher_qos(pub_qos);
pub_qos.entity_factory.autoenable_created_entities = false;
DDS::Publisher_var publisher = participant->create_publisher(pub_qos, /*...*/);
DDS::DataWriter_var datawriter1 = publisher->create_datawriter(/*...*/);
TheTransportRegistry->bind_config("tcp1", datawriter1);
datawriter1->enable();
The QoS can also be set on the domain participant or the service participant instead of the publisher or subscriber, but that requires manually calling enable() all the child entities of that entity.
Transport Registry Example¶
OpenDDS allows developers to also define transport configurations and instances via C++ APIs.
The OpenDDS::DCPS::TransportRegistry class is used to construct OpenDDS::DCPS::TransportConfig and OpenDDS::DCPS::TransportInst objects.
The TransportConfig and TransportInst classes contain public data member corresponding to the options defined below.
This section contains the code equivalent of the simple transport configuration file described in .
First, we need to include the correct header files:
#include <dds/DCPS/transport/framework/TransportRegistry.h>
#include <dds/DCPS/transport/framework/TransportConfig.h>
#include <dds/DCPS/transport/framework/TransportInst.h>
#include <dds/DCPS/transport/tcp/TcpInst.h>
using namespace OpenDDS::DCPS;
Next we create the transport configuration, create the transport instance, configure the transport instance, and then add the instance to the configuration’s collection of instances:
TransportConfig_rch cfg = TheTransportRegistry->create_config("myconfig");
TransportInst_rch inst = TheTransportRegistry->create_inst("mytcp", // name
"tcp"); // type
// Must cast to TcpInst to get access to transport-specific options
TcpInst_rch tcp_inst = dynamic_rchandle_cast<TcpInst>(inst);
tcp_inst->local_address_str_ = "myhost";
// Add the inst to the config
cfg->instances_.push_back(inst);
Lastly, we can make our newly defined transport configuration the global transport configuration:
TheTransportRegistry->global_config(cfg);
This code should be executed before any Data Readers or Writers are enabled.
See the header files included above for the full list of public data members and member functions that can be used. See the option descriptions in the following sections for a full understanding of the semantics of these settings.
Stepping back and comparing this code to the original configuration file from, the configuration file is much simpler than the corresponding C++ code and has the added advantage of being modifiable at run-time. It is easy to see why we recommend that almost all applications should use the configuration file mechanism for transport configuration.
Transport Configuration Properties¶
Transport Configurations are specified in the OpenDDS configuration file via sections with the format of [config/<name>], where <name> is a unique name for that configuration within that process.
- [config/<inst_name>]¶
- transports=<inst_name>|<template_name>[,<inst_name>|<template_name>...]¶
- Config store key:
CONFIG_<inst_name>_TRANSPORTSRequiredThe ordered list of
transport instanceortransport templatenames that this configuration will utilize. This field is required for every transport configuration.
- swap_bytes=<boolean>¶
- Config store key:
CONFIG_<inst_name>_SWAP_BYTESDefault:0(disabled)A value of
0causes DDS to serialize data in the source machine’s native endianness; a value of1causes DDS to serialize data in the opposite endianness. The receiving side will adjust the data for its endianness so there is no need to match this option between machines. The purpose of this option is to allow the developer to decide which side will make the endian adjustment, if necessary.
- passive_connect_duration=<msec>¶
- Config store key:
CONFIG_<inst_name>_PASSIVE_CONNECT_DURATIONDefault:10000(10 sec)Timeout (milliseconds) for initial passive connection establishment. A value of
0would wait indefinitely (not recommended).Without a suitable connection timeout, the subscriber endpoint can potentially enter a state of deadlock while waiting for the remote side to initiate a connection. Because there can be multiple transport instances on both the publisher and subscriber side, this option needs to be set to a high enough value to allow the publisher to iterate through the combinations until it succeeds.
In addition to the user-defined configurations, OpenDDS can implicitly define two transport configurations.
The first is the default configuration and includes all transport implementations that are linked into the process.
If none are found, then only [transport] transport_type=tcp is used.
Each of these transport instances uses the default configuration for that transport implementation.
This is the global transport configuration used when the user does not define one.
The second implicit transport configuration is defined whenever an OpenDDS configuration file is used.
It is given the same name as the file being read and includes all the transport instances defined in that file, in the alphabetical order of their names.
The user can most easily utilize this configuration by using the DCPSGlobalTransportConfig=$file option in the same file.
Transport Instance Properties¶
Transport instances are specified in the OpenDDS configuration file via sections with the format of [transport/<name>], where <name> is a unique name for that instance within that process.
Each transport instance must specify the [transport] transport_type option with a valid transport implementation type.
The following sections list the other options that can be specified, starting with those options common to all transport types and following with those specific to each transport type.
When using dynamic libraries, the OpenDDS transport libraries are dynamically loaded whenever an instance of that type is defined in a configuration file. When using custom transport implementations or static linking, the application developer is responsible for ensuring that the transport implementation code is linked with their executables. See Plugins for more information.
- [transport/<inst_name>]¶
- transport_type=tcp|udp|multicast|shmem|rtps_udp¶
- Config store key:
TRANSPORT_<inst_name>_TRANSPORT_TYPERequiredType of the transport; the list of available transports can be extended programmatically via the transport framework.
- tcp¶
Use the TCP Transport. See TCP Transport Configuration Properties for properties specific to this transport.
- udp¶
Use the UDP Transport. See UDP Transport Configuration Properties for properties specific to this transport.
- multicast¶
Use the Multicast Transport. See Multicast Transport Configuration Properties for properties specific to this transport.
- shmem¶
Use the Shared Memory Transport. See Shared Memory Transport Configuration Properties for properties specific to this transport.
- rtps_udp¶
Use the RTPS/UDP Transport. See RTPS UDP Transport Configuration Properties for properties specific to this transport.
- max_packet_size=<n>¶
- Config store key:
TRANSPORT_<inst_name>_MAX_PACKET_SIZEDefault:2147481599The maximum size of a transport packet, including its transport header, sample header, and sample data.
- max_samples_per_packet=<n>¶
- Config store key:
TRANSPORT_<inst_name>_MAX_SAMPLES_PER_PACKETDefault:10Maximum number of samples in a transport packet.
- optimum_packet_size=<n>¶
- Config store key:
TRANSPORT_<inst_name>_OPTIMUM_PACKET_SIZEDefault:4096(4 KiB)Transport packets greater than this size will be sent over the wire even if there are still queued samples to be sent. This value may impact performance depending on your network configuration and application nature.
- thread_per_connection=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_THREAD_PER_CONNECTIONDefault:0(disabled)Enable or disable the thread per connection send strategy. This option will increase performance when writing to multiple data readers on different process as long as the overhead of thread context switching does not outweigh the benefits of parallel writes. This balance of network performance to context switching overhead is best determined by experimenting. If a machine has multiple network cards, it may improve performance by creating a transport for each network card.
- event_dispatcher_threads=<n>¶
- Config store key:
TRANSPORT_<inst_name>_EVENT_DISPATCHER_THREADSDefault:1Number of threads used by the transport instance’s
EventDispatcher. Set this to0to reuse the globalService_Participantevent dispatcher instead of creating a transport-local dispatcher. This can reduce thread counts when a process contains many transport instances. Note: This value is currently only read and used at startup for EventDispatcher creation.
- datalink_release_delay=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_DATALINK_RELEASE_DELAYDefault:10000(10 sec)This is the delay in milliseconds that a datalink will be released after having no associations. Increasing this value may reduce the overhead of re-establishment when reader/writer associations are added and removed frequently.
- datalink_control_chunks=<n>¶
- Config store key:
TRANSPORT_<inst_name>_DATALINK_CONTROL_CHUNKSDefault:32The number of chunks used to size allocators for transport control samples.
- receive_preallocated_message_blocks=<n>¶
- Config store key:
TRANSPORT_<inst_name>_RECEIVE_PREALLOCATED_MESSAGE_BLOCKSDefault:0(use default)Set to a positive number to override the number of message blocks that the allocator reserves memory for eagerly (on startup).
- receive_preallocated_data_blocks=<n>¶
- Config store key:
TRANSPORT_<inst_name>_RECEIVE_PREALLOCATED_DATA_BLOCKSDefault:0(use default)Set to a positive number to override the number of data blocks that the allocator reserves memory for eagerly (on startup).
TCP Transport Configuration Properties¶
This section describes the configuration properties for the TCP Transport. A properly configured transport provides added resilience to underlying stack disturbances. Almost all of the options available to customize the connection and reconnection strategies have reasonable defaults, but ultimately these values should to be chosen based upon a careful study of the quality of the network and the desired QoS in the specific DDS application and target environment.
You can also configure the publisher and subscriber transport implementations programmatically, as described in Transport Registry Example. Configuring subscribers and publishers should be identical, but different addresses/ports should be assigned to each Transport Instance.
- [transport/<inst_name>] (tcp)¶
- active_conn_timeout_period=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_ACTIVE_CONN_TIMEOUT_PERIODDefault:5000(5 sec)The time period (milliseconds) for the active connection side to wait for the connection to be established. If not connected within this period then the
on_publication_lost()callbacks will be called.
- conn_retry_attempts=<n>¶
- Config store key:
TRANSPORT_<inst_name>_CONN_RETRY_ATTEMPTSDefault:3Number of reconnect attempts before giving up and calling the
on_publication_lost()andon_subscription_lost()callbacks.
- conn_retry_initial_delay=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_CONN_RETRY_INITIAL_DELAYDefault:500Initial delay (milliseconds) for reconnect attempt. As soon as a lost connection is detected, a reconnect is attempted. If this reconnect fails, a second attempt is made after this specified delay.
- conn_retry_backoff_multiplier=<n>¶
- Config store key:
TRANSPORT_<inst_name>_CONN_RETRY_BACKOFF_MULTIPLIERDefault:2.0The backoff multiplier for reconnection tries. After the initial delay described above, subsequent delays are determined by the product of this multiplier and the previous delay. For example, with a
conn_retry_initial_delayof500and aconn_retry_backoff_multiplierof1.5, the second reconnect attempt will be 0.5 seconds after the first retry connect fails; the third attempt will be 0.75 seconds after the second retry connect fails; the fourth attempt will be 1.125 seconds after the third retry connect fails.
- enable_nagle_algorithm=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_ENABLE_NAGLE_ALGORITHMDefault:0(disabled)Enable or disable the Nagle’s algorithm. Enabling the Nagle’s algorithm may increase throughput at the expense of increased latency.
- send_buffer_size=<n>¶
- Config store key:
TRANSPORT_<inst_name>_SEND_BUFFER_SIZEDefault:0(use platform default)Total send buffer size in bytes for TCP payload. Set this to a positive value to explicitly configure
SO_SNDBUF. Leave it at0to use the platform’s default TCP buffer sizing behavior.
- rcv_buffer_size=<n>¶
- Config store key:
TRANSPORT_<inst_name>_RCV_BUFFER_SIZEDefault:0(use platform default)Total receive buffer size in bytes for TCP payload. Set this to a positive value to explicitly configure
SO_RCVBUF. Leave it at0to use the platform’s default TCP buffer sizing behavior.
- local_address=<host>:<port>¶
- Config store key:
TRANSPORT_<inst_name>_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressHostname and port of the connection acceptor. If only the host is specified and the port number is omitted, the
:is still required on the host specifier.The
local_addressoption is used by the peer to establish a connection. By default, the TCP transport selects an ephemeral port number on the NIC with the FQDN (fully qualified domain name) resolved. Therefore, you may wish to explicitly set the address if you have multiple NICs or if you wish to specify the port number. When you configure inter-host communication,local_addresscan not be localhost and should be configured with an externally visible address (i.e. 192.168.0.2), or you can leave it unspecified in which case the FQDN and an ephemeral port will be used.FQDN resolution is dependent upon system configuration. In the absence of a FQDN (e.g.
example.opendds.org), OpenDDS will use any discovered short names (e.g. example). If that fails, it will use the name resolved from the loopback address (e.g. localhost).Note
OpenDDS IPv6 support requires that the underlying ACE/TAO components be built with IPv6 support enabled. The
local_addressneeds to be an IPv6 decimal address or a FQDN with port number. The FQDN must be resolvable to an IPv6 address.
- max_output_pause_period=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_MAX_OUTPUT_PAUSE_PERIODDefault:0(disabled)Maximum period (milliseconds) of not being able to send queued messages. If there are samples queued and no output for longer than this period then the connection will be closed and
on_*_lost()callbacks will be called. The default value of0means that this check is not made.
- passive_reconnect_duration=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_PASSIVE_RECONNECT_DURATIONDefault:2000(2 seconds)The time period (milliseconds) for the passive connection side to wait for the connection to be reconnected. If not reconnected within this period then the
on_*_lost()callbacks will be called.
- pub_address=<host>:<port>¶
- Config store key:
TRANSPORT_<inst_name>_PUB_ADDRESSOverride the address sent to peers with the configured string. This can be used for firewall traversal and other advanced network configurations.
TCP Reconnection Properties¶
When a TCP connection gets closed OpenDDS attempts to reconnect. The reconnection process is (a successful reconnect ends this sequence):
Upon detecting a lost connection immediately attempt to reconnect.
If that fails, then wait
[transport] conn_retry_initial_delay (tcp)milliseconds and attempt reconnect.While we have not tried more than
[transport] conn_retry_attempts (tcp), wait (previous wait time *[transport] conn_retry_backoff_multiplier (tcp)) milliseconds and attempt to reconnect.
UDP Transport Configuration Properties¶
This section describes the configuration properties for the UDP Transport.
- [transport/<inst_name>] (udp)¶
- local_address=<host>:<port>¶
- Config store key:
TRANSPORT_<inst_name>_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressHostname and port of the listening socket. The port can be omitted, in which case the value should end in
:.
- send_buffer_size=<n>¶
- Config store key:
TRANSPORT_<inst_name>_SEND_BUFFER_SIZEDefault: Platform value ofACE_DEFAULT_MAX_SOCKET_BUFSIZTotal send buffer size in bytes for UDP payload.
- rcv_buffer_size=<n>¶
- Config store key:
TRANSPORT_<inst_name>_RCV_BUFFER_SIZEDefault: Platform value ofACE_DEFAULT_MAX_SOCKET_BUFSIZTotal receive buffer size in bytes for UDP payload.
Multicast Transport Configuration Properties¶
This section describes the configuration properties for the Multicast Transport.
This transport has the following restrictions:
At most, one DDS domain may be used per multicast group;
A given participant may only have a single
multicasttransport attached per multicast group; if you wish to send and receive samples on the same multicast group in the same process, independent participants must be used.
- [transport/<inst_name>] (multicast)¶
- default_to_ipv6=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_DEFAULT_TO_IPV6Default:0(disabled)The
default_to_ipv6andport_offsetoptions affect how default multicast group addresses are selected. Ifdefault_to_ipv6is set to1(enabled), then the default IPv6 address will be used ([FF01::80]).
- group_address=<host>:<port>¶
- Config store key:
TRANSPORT_<inst_name>_GROUP_ADDRESSDefault:224.0.0.128:,[FF01::80]:This property may be used to manually define a multicast group to join to exchange data. Both IPv4 and IPv6 addresses are supported. OpenDDS IPv6 support requires that the underlying ACE/TAO components be built with IPv6 support enabled.
- local_address=<address>¶
- Config store key:
TRANSPORT_<inst_name>_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressIf non-empty, address of a local network interface which is used to join the multicast group. On hosts with multiple network interfaces, it may be necessary to specify that the multicast group should be joined on a specific interface.
- nak_delay_intervals=<n>¶
- Config store key:
TRANSPORT_<inst_name>_NAK_DELAY_INTERVALSDefault:4The number of intervals between naks after the initial nak.
- nak_depth=<n>¶
- Config store key:
TRANSPORT_<inst_name>_NAK_DEPTHDefault:32The number of datagrams to retain in order to service repair requests (reliable only).
- nak_interval=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_NAK_INTERVALDefault:500The minimum number of milliseconds to wait between repair requests (reliable only). This interval is randomized to prevent potential collisions between similarly associated peers. Use this option so that naks will be not be sent repeatedly for unrecoverable packets before
nak_timeout.
- nak_max=<n>¶
- Config store key:
TRANSPORT_<inst_name>_NAK_MAXDefault:3The maximum number of times a missing sample will be nak’ed. The maximum delay between repair requests is bounded to double the minimum value.
- nak_timeout=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_NAK_TIMEOUTDefault:30000(30 sec)The maximum number of milliseconds to wait before giving up on a repair response (reliable only).
- port_offset=<n>¶
- Config store key:
TRANSPORT_<inst_name>_PORT_OFFSETDefault:49152Used to set the port number when not specifying a group address. When a group address is specified, the port number within it is used. If no group address is specified, the port offset is used as a port number. This value should not be set less than
49152.
- rcv_buffer_size=<n>¶
- Config store key:
TRANSPORT_<inst_name>_RCV_BUFFER_SIZEDefault:0(system default buffer size)The size of the socket receive buffer in bytes. A value of zero indicates that the system default value is used.
- reliable=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_RELIABLEDefault:1(enabled)Enables reliable communication.
- syn_backoff=<n>¶
- Config store key:
TRANSPORT_<inst_name>_SYN_BACKOFFDefault:2.0The exponential base used during handshake retries; smaller values yield shorter delays between attempts.
Given the values of
syn_backoffandsyn_interval, it is possible to calculate the delays between handshake attempts (bounded bysyn_timeout):delay = syn_interval * syn_backoff ^ number_of_retries
For example, if the default configuration options are assumed, the delays between handshake attempts would be: 0, 250, 1000, 2000, 4000, and 8000 milliseconds respectively.
- syn_interval=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_SYN_INTERVALDefault:250The minimum number of milliseconds to wait between handshake attempts during association.
- syn_timeout=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_SYN_TIMEOUTDefault:30000(30 sec)The maximum number of milliseconds to wait before giving up on a handshake response during association.
- ttl=<n>¶
- Config store key:
TRANSPORT_<inst_name>_TTLDefault:1(all data is restricted to the local network)The value of the time-to-live (TTL) field of any datagrams sent. This value specifies the number of hops the datagram will traverse before being discarded by the network.
- async_send=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_ASYNC_SENDDefault:0(disabled)Send datagrams using asynchronous I/O on platforms that support it efficiently.
RTPS UDP Transport Configuration Properties¶
This section describes the configuration properties for the RTPS/UDP Transport.
To provide an RTPS variant of the single configuration example from Single Transport Configuration, the configuration file below simply introduces the myrtps transport and sets [transport] transport_type=rtps_udp.
All other items remain the same.
[common]
DCPSGlobalTransportConfig=myconfig
[config/myconfig]
transports=myrtps
[transport/myrtps]
transport_type=rtps_udp
local_address=myhost
To extend our examples to a mixed transport configuration as shown in Using Mixed Transports, below shows the use of an rtps_udp transport mixed with a TCP Transport transport.
The interesting pattern that this allows for is a deployed OpenDDS application that can be, for example, communicating using tcp with other OpenDDS participants while communicating in an interoperability configuration with a non-OpenDDS participant using rtps_udp.
[common]
DCPSGlobalTransportConfig=myconfig
[config/myconfig]
transports=mytcp,myrtps
[transport/myrtps]
transport_type=rtps_udp
[transport/mytcp]
transport_type=tcp
Some implementation notes related to using the rtps_udp transport protocol are as follows:
RTPS v2.3 8.7.2.2.7 WRITER_DATA_LIFECYCLE notes that the same Data sub-message should dispose and unregister an instance. OpenDDS may use two Data sub-messages.
RTPS UDP transport instances can not be shared by different Domain Participants. Configuration templates can be used to workaround this.
Transport auto-selection (negotiation) is partially supported with RTPS such that the
rtps_udptransport goes through a handshaking phase only in reliable mode.
- [transport/<inst_name>] (rtps_udp)¶
- use_multicast=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_USE_MULTICASTDefault:1(enabled)The
rtps_udptransport can use Unicast or Multicast. When set to0(false) the transport uses Unicast, otherwise a value of1(true) will use Multicast.
- multicast_group_address=<host>:<port>¶
- Config store key:
TRANSPORT_<inst_name>_MULTICAST_GROUP_ADDRESSDefault:239.255.0.2:0When
use_multicastis enabled, this is the multicast network address that should be used. If<port>is0or not specified, it is calculated as described in Multicast. It can be modified by[Customization] multicast_group_address.
- ipv6_multicast_group_address=<network_address>¶
- Config store key:
TRANSPORT_<inst_name>_IPV6_MULTICAST_GROUP_ADDRESSDefault:[FF03::2]:0When
use_multicastis enabled, this is the multicast IPv6 network address that should be used. If<port>is0or not specified, it is calculated as described in Multicast.
- multicast_interface=<iface>¶
- Config store key:
TRANSPORT_<inst_name>_MULTICAST_INTERFACEDefault:[common] DCPSDefaultAddressSpecifies the network interface to be used by this transport instance. This uses a platform-specific format that identifies the network interface.
- local_address=<host>:[<port>]¶
- Config store key:
TRANSPORT_<inst_name>_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressBind the socket to the given address and port.
<port>can be omitted but the trailing:is required. If<port>is0or not specified, it is calculated as described in Unicast.
- ipv6_local_address=<host>:[<port>]¶
- Config store key:
TRANSPORT_<inst_name>_IPV6_LOCAL_ADDRESSDefault:[common] DCPSDefaultAddressBind the socket to the given address and port.
<port>can be omitted but the trailing:is required. If<port>is0or not specified, it is calculated as described in Unicast.
- PortMode=system|probe¶
- Config store key:
TRANSPORT_<inst_name>_PORT_MODEDefault:systemWhen
local_addressandipv6_local_addressdon’t explicitly set the ports, they are assigned according to one of these methods:- system¶
The operating system assigns one when the socket is opened.
- probe¶
- PB=<n>¶
- Config store key:
TRANSPORT_<inst_name>_PBDefault:7400The port base parameter for the computed RTPS ports.
- DG=<n>¶
- Config store key:
TRANSPORT_<inst_name>_DGDefault:250The domain gain coefficient parameter for the computed RTPS ports.
- PG=<n>¶
- Config store key:
TRANSPORT_<inst_name>_PGDefault:2The participant gain coefficient parameter for the computed RTPS ports.
- D2=<n>¶
- Config store key:
TRANSPORT_<inst_name>_D2Default:1The offset parameter for the computed multicast port.
- D3=<n>¶
- Config store key:
TRANSPORT_<inst_name>_D3Default:11The offset parameter for the computed unicast port.
- advertised_address=<addr>:[<port>]¶
- Config store key:
TRANSPORT_<inst_name>_ADVERTISED_ADDRESSSets the address advertised by the transport. Typically used when the participant is behind a firewall or NAT. Port can be omitted but the trailing
:is required.
- ipv6_advertised_address=<addr>:[<port>]¶
- Config store key:
TRANSPORT_<inst_name>_IPV6_ADVERTISED_ADDRESSSets the address advertised by the transport. Typically used when the participant is behind a firewall or NAT. Port can be omitted but the trailing
:is required.
- send_delay=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_SEND_DELAYDefault:10Time in milliseconds for an RTPS Writer to wait before sending data.
- nak_depth=<n>¶
- Config store key:
TRANSPORT_<inst_name>_NAK_DEPTHDefault:32The number of data samples to retain in order to service repair requests (reliable only).
- nak_response_delay=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_NAK_RESPONSE_DELAYDefault:200Protocol tuning parameter that allows the RTPS Writer to delay the response (expressed in milliseconds) to a request for data from a negative acknowledgment.
See RTPS v2.3 8.4.7.1 RTPS Writer for more information.
- heartbeat_period=<msec>¶
- Config store key:
TRANSPORT_<inst_name>_HEARTBEAT_PERIODDefault:1000(1 sec)Protocol tuning parameter that specifies in milliseconds how often an RTPS Writer announces the availability of data.
See RTPS v2.3 8.4.7.1 RTPS Writer for more information.
- ResponsiveMode=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_RESPONSIVE_MODEDefault:0(disabled)Causes reliable writers and readers to send additional messages which may reduce latency.
- max_message_size=<n>¶
- Config store key:
TRANSPORT_<inst_name>_MAX_MESSAGE_SIZEDefault:65466(maximum worst-case UDP payload size)The maximum message size.
- send_buffer_size=<bytes>¶
- Config store key:
TRANSPORT_<inst_name>_SEND_BUFFER_SIZEDefault:0(system default value is used,65466typical)Socket send buffer size for sending RTPS messages.
- rcv_buffer_size=<bytes>¶
- Config store key:
TRANSPORT_<inst_name>_RCV_BUFFER_SIZEDefault:0(system default value is used,65466typical)Socket receive buffer size for receiving RTPS messages.
- ttl=<n>¶
- Config store key:
TRANSPORT_<inst_name>_TTLDefault:1(all data is restricted to the local network)The value of the time-to-live (TTL) field of any multicast datagrams sent. This value specifies the number of hops the datagram will traverse before being discarded by the network.
- DataRtpsRelayAddress=<host>:<port>¶
- Config store key:
TRANSPORT_<inst_name>_DATA_RTPS_RELAY_ADDRESSSpecifies the address of the RtpsRelay for RTPS messages.
- RtpsRelayOnly=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_RTPS_RELAY_ONLYDefault:0Only send RTPS message to the RtpsRelay (for debugging).
- UseRtpsRelay=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_USE_RTPS_RELAYDefault:0Send messages to the RtpsRelay. Messages will only be sent if
DataRtpsRelayAddressis set.
- DataStunServerAddress=<host>:<port>¶
- Config store key:
TRANSPORT_<inst_name>_DATA_STUN_SERVER_ADDRESSSpecifies the address of the STUN server to use for RTPS when using ICE.
- UseIce=<boolean>¶
- Config store key:
TRANSPORT_<inst_name>_USE_ICEDefault:0Enable or disable ICE for this transport instance.
Ports Used by RTPS/UDP¶
See also
RTPS v2.3 9.6.1 Default Locators for the RTPS spec definitions.
Multicast¶
If use_multicast=1 the RTPS/UDP multicast port will be one of the following:
Port from
multicast_group_addressandipv6_multicast_group_addressif set
Unicast¶
The RTPS/UDP unicast port will be one of the following:
Port from
local_addressandipv6_local_addressif setPB+DG× domainId +D3+PG× participantId ifPortMode=probeparticipantId starts at 0 and if the port can not be opened, then the participantId is incremented until a port can be opened.
If no valid UDP port can be opened, then an error will be logged.
A system-provided port if
PortMode=system(default)
Additional RTPS UDP Features¶
The RTPS UDP transport implementation has capabilities that can only be enabled by API. These features cannot be enabled using configuration files.
The RtpsUdpInst class has a method count_messages(bool flag) via inheritance from TransportInst.
With count_messages enabled, the transport will track various counters and make them available to the application using the method append_transport_statistics(TransportStatisticsSequence& seq).
The elements of that sequence are defined in IDL: OpenDDS::DCPS::TransportStatistics and detailed in the tables below.
Type |
Name |
Description |
|---|---|---|
|
|
The name of the transport. |
|
|
Set of message counts grouped by remote address. See the MessageCount table below. |
|
|
Map of counts indicating how many times a local writer has resent a data sample. Each element in the sequence is a structure containing a GUID and a count. |
|
|
Map of counts indicating how many times a local reader has requested a sample to be resent. |
Type |
Name |
Description |
|---|---|---|
|
|
A byte array containing an IPv4 or IPv6 address. |
|
|
Key indicating the type of message count for transports that use multiple protocols. |
|
|
Indicates that the locator is a relay. |
|
|
Number of messages sent to the locator. |
|
|
Number of bytes sent to the locator. |
|
|
Number of sends directed at the locator that failed. |
|
|
Number of bytes directed at the locator that failed. |
|
|
Number of messages received from the locator. |
|
|
Number of bytes received from the locator. |
ICE Configuration¶
The [ice] section of an OpenDDS configuration file contains settings for the ICE Agent.
See Interactive Connectivity Establishment (ICE) for RTPS for details about OpenDDS’s implementation of ICE.
A sample [ice] section follows:
[ice]
Ta=50
ConnectivityCheckTTL=300
ChecklistPeriod=10
IndicationPeriod=15
NominatedTTL=300
ServerReflexiveAddressPeriod=30
ServerReflexiveIndicationCount=10
DeferredTriggeredCheckTTL=300
ChangePasswordPeriod=300
- [ice]¶
- Ta=<msec>¶
- Config store key:
ICE_TADefault:50Minimum interval between ICE sends.
- ConnectivityCheckTTL=<sec>¶
- Config store key:
ICE_CONNECTIVITY_CHECK_TTLDefault:300(5 minutes)Maximum duration of connectivity check.
- ChecklistPeriod=<sec>¶
- Config store key:
ICE_CHECKLIST_PERIODDefault:10Attempt to cycle through all of the connectivity checks for a candidate in this amount of time.
- IndicationPeriod=<sec>¶
- Config store key:
ICE_INDICATION_PERIODDefault:15Send STUN indications to peers to maintain NAT bindings at this period.
- NominatedTTL=<sec>¶
- Config store key:
ICE_NOMINATED_TTLDefault:300(5 minutes)Forget a valid candidate if an indication is not received in this amount of time.
- ServerReflexiveAddressPeriod=<sec>¶
- Config store key:
ICE_SERVER_REFLEXIVE_ADDRESS_PERIODDefault:30Send a messages to the STUN server at this period.
- ServerReflexiveIndicationCount=<integer>¶
- Config store key:
ICE_SERVER_REFLEXIVE_INDICATION_COUNTDefault:10Send this many indications before sending a new binding request to the STUN server.
- DeferredTriggeredCheckTTL=<sec>¶
- Config store key:
ICE_DEFERRED_TRIGGERED_CHECK_TTLDefault:300(5 minutes)Purge deferred checks after this amount of time.
- ChangePasswordPeriod=<sec>¶
- Config store key:
ICE_CHANGE_PASSWORD_PERIODDefault:300(5 minutes)Change the ICE password after this amount of time.
Discovery and Transport Configuration Templates¶
OpenDDS supports dynamic configuration of RTPS Discovery and Transports by means of configuration templates in OpenDDS configuration files.
This feature adds 3 optional file sections, [DomainRange], [Customization], and [transport_template].
Configuration templates are processed at application startup; however, creation of domain, discovery, and transport objects is deferred until a participant is created in a corresponding domain.
Without templates an OpenDDS application with participants using RTPS discovery in 5 different domains will have a configuration file with 5 separate, but nearly identical, [domain] sections.
The same functionality can be accomplished with a single [DomainRange/1-5] section using templates.
Configuring Discovery for a Set of Similar Domains¶
- [DomainRange/<minimum_domain_id>-<maximum_domain_id>]¶
Domain ranges must have a minimum and maximum domain, such as
[DomainRange/1-5].[DomainRange]sections are templates for the[domain]sections and accept all[domain]configuration properties and the following configuration properties:- DiscoveryTemplate=<rtps_discovery_inst_name>¶
- Config store key:
DOMAIN_RANGE_<minimum_domain_id>-<maximum_domain_id>_DISCOVERY_TEMPLATERequiredDomain ranges uses this rather than the
[domain] DiscoveryConfigproperty to denote the corresponding[rtps_discovery]section.
- Customization=<customization_name>¶
- Config store key:
DOMAIN_RANGE_<minimum_domain_id>-<maximum_domain_id>_CUSTOMIZATIONUse this
[Customization]section.
See Example Configuration File for a [DomainRange] example.
Configuring a Set of Similar Transports¶
- [transport_template/<template_name>]¶
[transport_template]sections are templates for the[transport]sections and accept all[transport]configuration properties and the following configuration properties:- instantiation_rule=|per_participant¶
- Config store key:
TRANSPORT_TEMPLATE_<template_name>_INSTANTIATION_RULEDefault: (empty string, a transport instance is created for each domain)- per_participant¶
A separate transport instance will be created for each DomainParticipant. This allows applications to have multiple participants per domain when using RTPS Discovery.
- Customization=<customization_name>¶
- Config store key:
TRANSPORT_TEMPLATE_<template_name>_CUSTOMIZATIONUse this
[Customization]section.
To associate a transport template with a domain range in a configuration file, set the DCPSGlobalTransportConfig property to the name of the [config] whose [config] transports property is the name of the [transport_template].
For example, for a global config setting:
[common]
DCPSGlobalTransportConfig=primary_config
a corresponding config could be:
[config/primary_config]
transports=auto_config_rtps
and the partial transport template would be:
[transport_template/auto_config_rtps]
transport_type=rtps_udp
Domain participants that belong to a domain that is configured by a template can bind to non-global transport configurations using the bind_config function.
See Using Multiple Configurations for a discussion of bind_config.
If [transport_template] instantiation_rule=per_participant, a separate transport instance will be created for each participant in the domain.
See Example Configuration File for a [transport_template] example.
Adding Customizations¶
- [Customization/<customization_name>]¶
This section can be used to modify values based the on the domain ID so they are unique for each domain.
- multicast_group_address=|add_domain_id_to_ip_addr|add_domain_id_to_port¶
- Config store key:
CUSTOMIZATION_<customization_name>_MULTICAST_GROUP_ADDRESSDefault: (empty string, not modified)Modifies
[transport] multicast_group_address (rtps_udp).- add_domain_id_to_ip_addr¶
Adds the domain ID to the last octet of the multicast group address.
- add_domain_id_to_port¶
Use the domain ID in the port calculation for the multicast group address.
- InteropMulticastOverride=|AddDomainId¶
- Config store key:
CUSTOMIZATION_<customization_name>_INTEROP_MULTICAST_OVERRIDEDefault: (empty string, not modified)Modifies
[rtps_discovery] InteropMulticastOverride.- AddDomainId¶
Adds the domain id to the last octet of the multicast address used for SPDP.
Example Configuration File¶
The following is an example configuration file for domains 2 through 10.
It includes customizations to add the domain ID to [rtps_discovery] InteropMulticastOverride and [transport] multicast_group_address (rtps_udp).
[common]
DCPSGlobalTransportConfig=the_config
[DomainRange/2-10]
DiscoveryTemplate=DiscoveryConfigTemplate
[Customization/discovery_customization]
InteropMulticastOverride=AddDomainId
[Customization/transport_customization]
multicast_group_address=add_domain_id_to_ip_addr,add_domain_id_to_port
[rtps_discovery/DiscoveryConfigTemplate]
InteropMulticastOverride=239.255.4.0
Customization=discovery_customization
SedpMulticast=1
[config/the_config]
transports=auto_config_rtps
[transport_template/auto_config_rtps]
transport_type=rtps_udp
instantiation_rule=per_participant
Customization=transport_customization
multicast_group_address=239.255.2.0
Logging¶
By default, the OpenDDS framework will only log serious errors and warnings that can’t be conveyed to the user in the API. An OpenDDS user may increase the amount of logging via the log level and debug logging via controls at the DCPS, Transport, or Security layers.
The default destination of these log messages is the process’s standard error stream. See Common Configuration Properties for options controlling the destination and formatting of log messages.
The highest level logging is controlled by the general log levels listed in the following table.
Level |
Values |
Description |
|---|---|---|
N/A |
|
Disables all logging. |
Error |
|
Logs issues that may prevent OpenDDS from functioning properly or functioning as configured. |
Warning |
|
Log issues that should probably be addressed, but don’t prevent OpenDDS from functioning. This is the default. |
Notice |
|
Logs details of issues that are returned to the user via the API, for example through a |
Info |
|
Logs a small amount of basic information, such as the version of OpenDDS being used. |
Debug |
|
This level doesn’t directly control any logging but will enable at least DCPS and security debug level 1. For backwards compatibility, setting DCPS debug logging to greater than zero will set this log level. Setting the log level to below this level will disable all debug logging. |
The log level can be set a number of ways. To do it with command line arguments, pass:
-DCPSLogLevel notice
Using a configuration file option is similar:
[common]
DCPSLogLevel=notice
Doing this from code can be done using an enumerator or a string:
OpenDDS::DCPS::log_level.set(OpenDDS::DCPS::LogLevel::Notice);
OpenDDS::DCPS::log_level.set_from_string("notice");
Passing invalid levels to the text-based methods will cause warning messages to be logged unconditionally, but will not cause the DomainParticipantFactory to fail to initialize.
DCPS Layer Debug Logging¶
Debug logging in the DCPS layer of OpenDDS is controlled by the DCPSDebugLevel configuration option and command-line option.
It can also be set in application code using:
OpenDDS::DCPS::set_DCPS_debug_level(level)
The level defaults to a value of 0 and has values of 0 to 10 as defined below:
0 – debug logging is disabled
1 – logs that should happen once per process
2 – logs that should happen once per DDS entity
4 – logs that are related to administrative interfaces
6 – logs that should happen every Nth sample write/read
8 – logs that should happen once per sample write/read
10 – logs that may happen more than once per sample write/read
Transport Layer Debug Logging¶
OpenDDS transport debug layer logging is controlled via the DCPSTransportDebugLevel configuration option.
For example, to add transport layer logging to any OpenDDS application that uses TheParticipantFactoryWithArgs, add the following option to the command line:
-DCPSTransportDebugLevel level
The transport layer logging level can also be configured by setting the variable:
OpenDDS::DCPS::Transport_debug_level = level;
Valid transport logging levels range from 0 to 5 with increasing verbosity of output.
Note
Transport logging level 6 is available to generate system trace logs.
Using this level is not recommended as the amount of data generated can be overwhelming and is mostly of interest only to OpenDDS developers.
Setting the logging level to 6 requires defining the DDS_BLD_DEBUG_LEVEL macro to 6 and rebuilding OpenDDS.
There are additional debug logging options available through the transport_debug object that are separate from the logging controlled by the transport debug level.
For the moment this can only be configured using C++; for example:
OpenDDS::DCPS::transport_debug.log_progress = true;
Option |
Description |
|---|---|
|
Log progress for RTPS entity discovery and association. |
|
Log received RTPS messages that were dropped. |
|
Log non-final RTPS messages send or received. Useful to gauge lost messages and resends. |
|
Log fragment reassembly process for transports where that applies. Also logged when the transport debug level is set to the most verbose. |
|
Log number of associations and pending associations of RTPS entities. |
Security Debug Logging¶
When OpenDDS is compiled with security enabled, debug logging for security can be enabled using DCPSSecurityDebug.
Security logging is divided into categories, although DCPSSecurityDebugLevel is also provided, which controls the categories in a similar manner and using the same scale as DCPSDebugLevel.
Option |
Debug Level |
Description |
|---|---|---|
N/A |
0 |
The default. Security related messages are not logged. |
|
1 |
Log errors from permission and governance file parsing. |
|
1 |
Log security-related errors that prevented a DDS entity from being created. |
|
1 |
Log errors from cleaning up DDS entities in the security plugins. |
|
2 |
Log warnings from permission and governance file parsing. |
|
3 |
Log warnings from the authentication and handshake that happen when two secure participants discover each other. |
|
3 |
Log errors from the encryption and decryption of RTPS messages. |
|
3 |
Log security-related warnings from creating a DDS entity. |
|
4 |
Log generation of crypto handles and keys for local DDS entities and tracking crypto handles and keys for remote DDS entities. |
|
4 |
Log debug information from the authentication and handshake that happen when two secure participants discover each other. |
|
4 |
Log warnings from the encryption and decryption of RTPS messages. |
|
8 |
Log debug information from the encryption and decryption of RTPS messages. |
|
9 |
Log the whole key when generating it, receiving it, and using it. |
|
10 |
Very verbosely prints the steps being taken when looking up a crypto handle for decrypting. This is most useful to see what keys a participant has. |
|
10 |
Enable all the security related logging. |
Categories are passed to DCPSecurityDebug using a comma limited list:
-DCPSSecurityDebug=access_warn,showkeys
Unknown categories will cause warning messages, but will not cause the DomainParticipantFactory to fail to initialize.
Like the other debug levels, security logging can also be programmatically configured. All the following are equivalent:
OpenDDS::DCPS::security_debug.access_warn = true;
OpenDDS::DCPS::security_debug.set_debug_level(1);
OpenDDS::DCPS::security_debug.parse_flags(ACE_TEXT("access_warn"));
Footnotes